
本系列主要讲解STM32CubeHAL的使用,详细的安装部署教程请见【STM32】STM32 CubeMx使用教程一–安装教程-CSDN博客
SPI相关原理请详见标准版笔记
SPI
工程配置
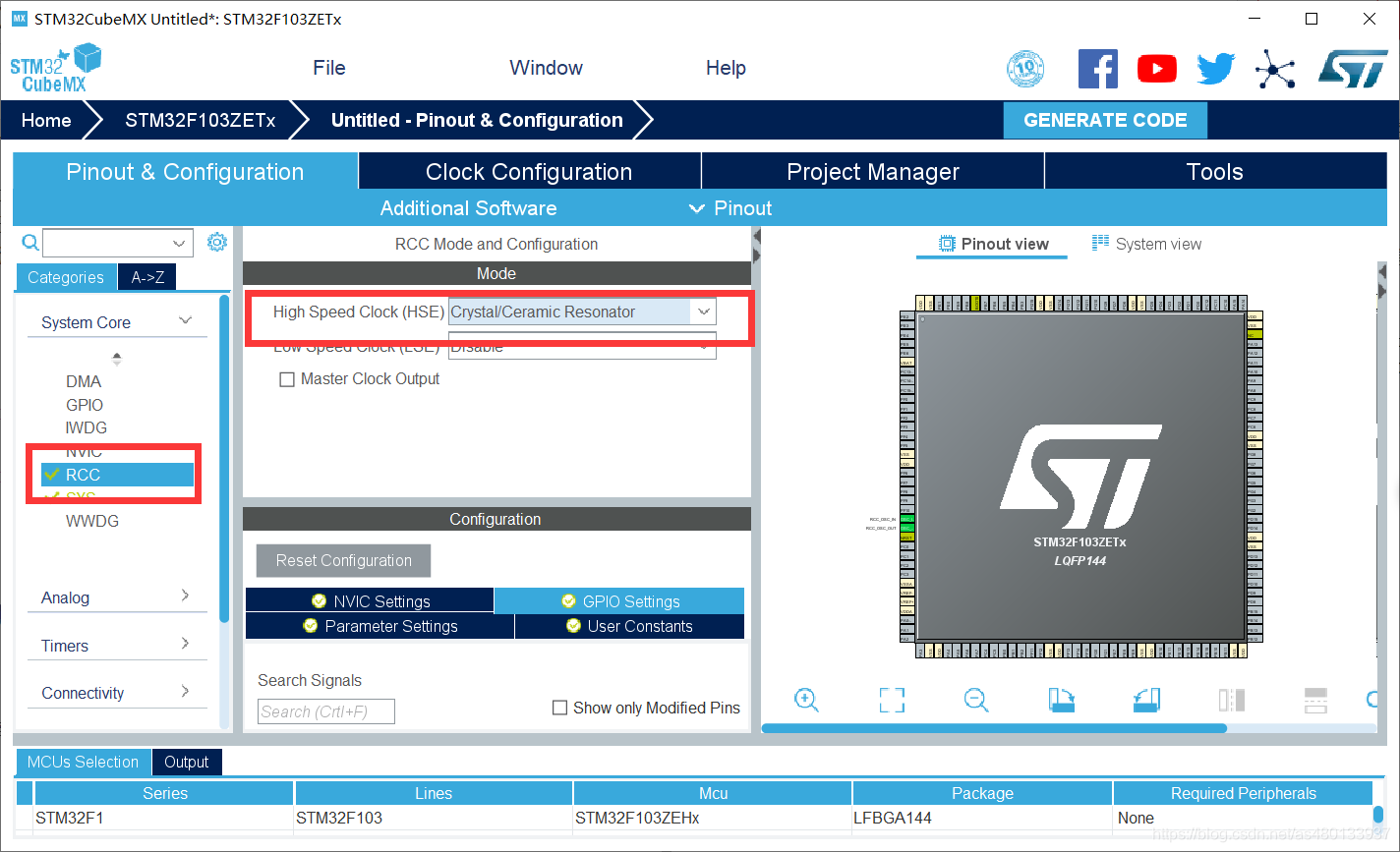
1设置RCC时钟
设置高速外部时钟HSE 选择外部时钟源
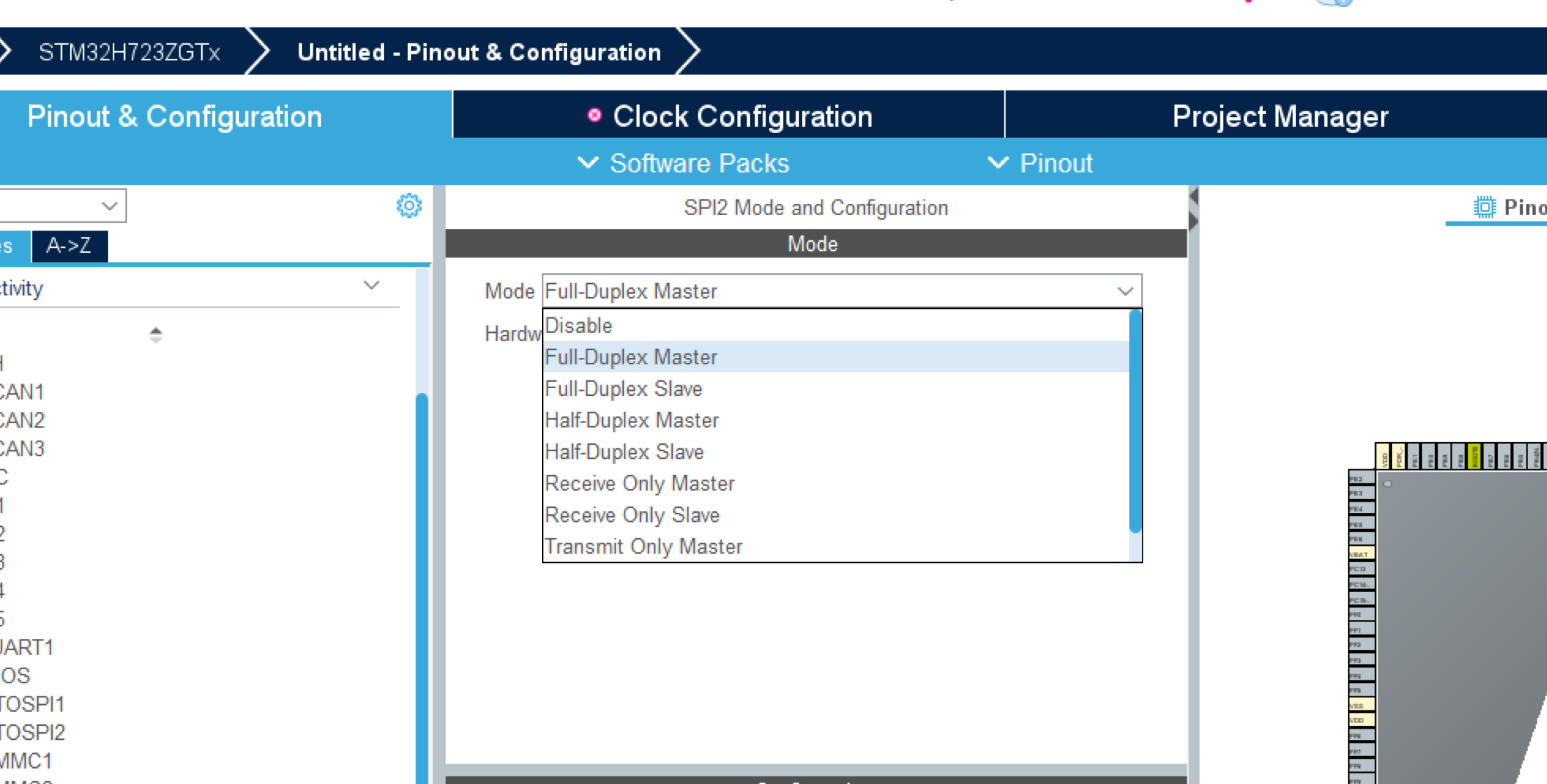
2 SPI设置
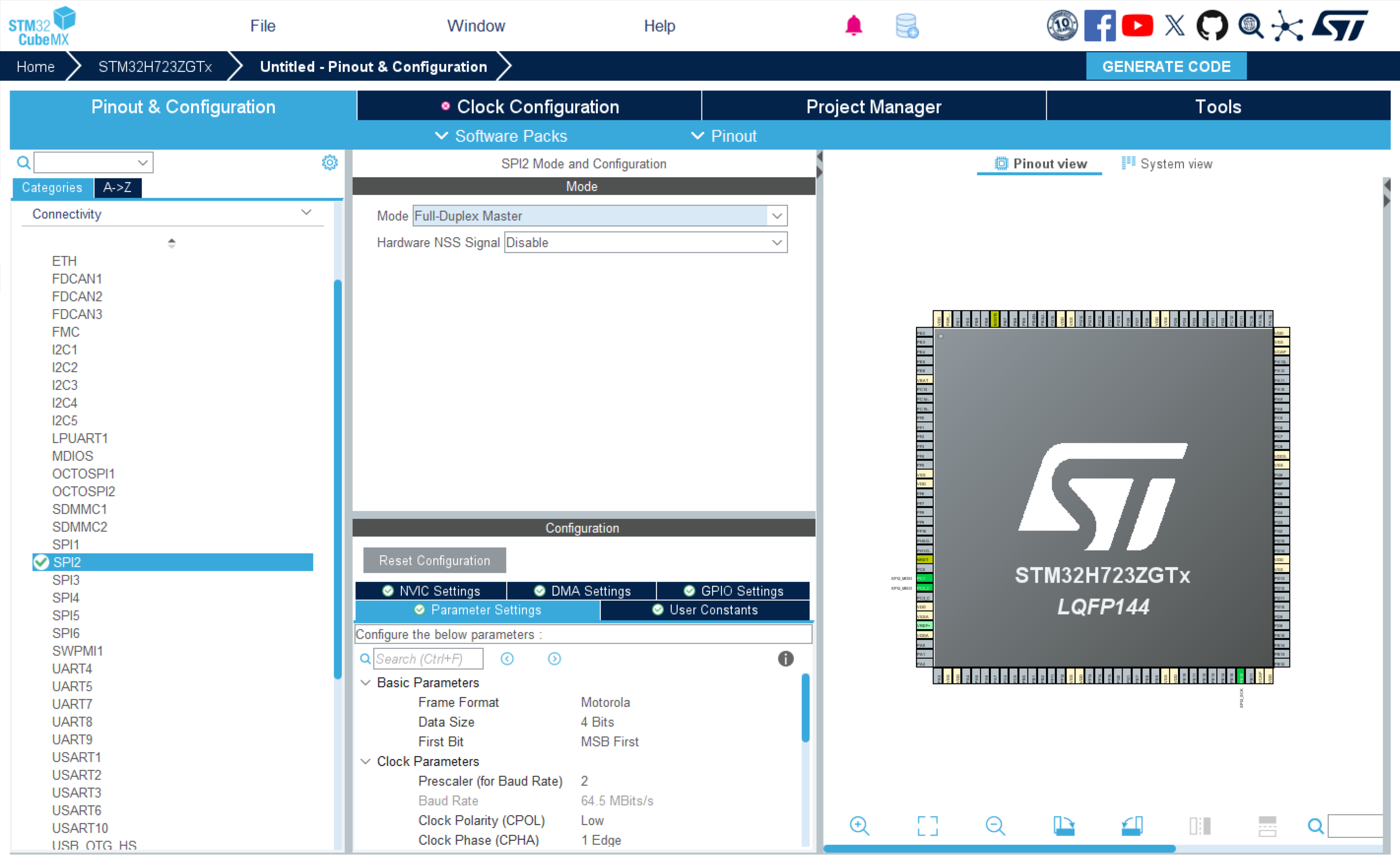
SPI2设置为全双工主模式,硬件NSS关闭,如下图:
模式设置:
- 有主机模式全双工/半双工
- 从机模式全双工/半双工
- 只接收主机模式/只接收从机模式
- 只发送主机模式
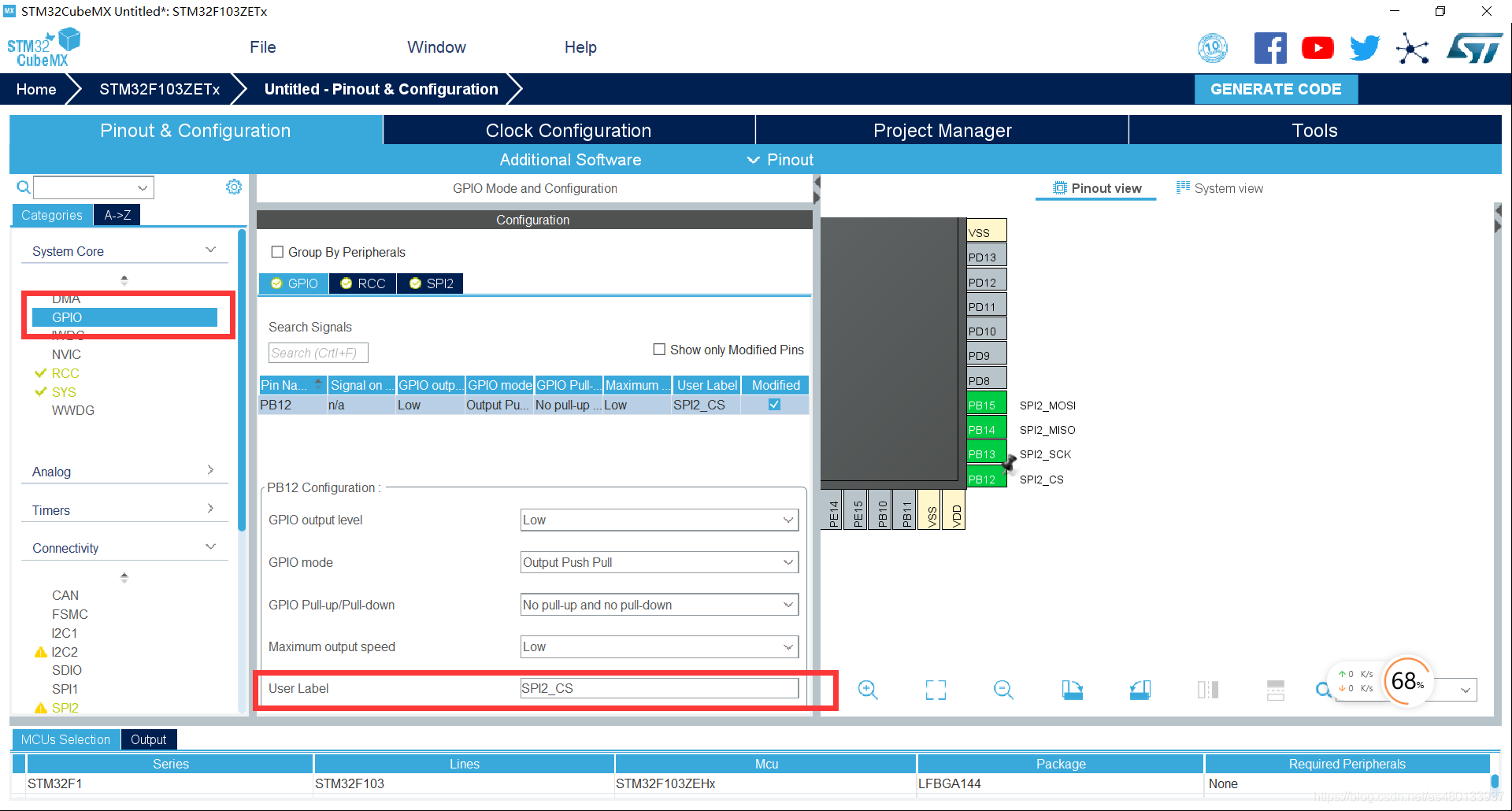
STM32有硬件NSS(片选信号),可以选择使能,也可以使用其他IO口接到芯片的NSS上进行代替
其中SIP1的片选NSS : SPI1_NSS(PA4)
其中SIP2的片选NSS : SPI2_NSS(PB12)
如果片选引脚没有连接 SPI1_NSS(PA4)或者SPI2_NSS(PB12),则需要选择软件片选
NSS管脚及我们熟知的片选信号,作为主设备NSS管脚为高电平,从设备NSS管脚为低电平。当NSS管脚为低电平时,该spi设备被选中,可以和主设备进行通信。在stm32中,每个spi控制器的NSS信号引脚都具有两种功能,即输入和输出。所谓的输入就是NSS管脚的信号给自己。所谓的输出就是将NSS的信号送出去,给从机。
对于NSS的输入,又分为软件输入和硬件输入。
软件输入:
NSS分为内部管脚和外部管脚,通过设置spi_cr1寄存器的ssm位和ssi位都为1可以设置NSS管脚为软件输入模式且内部管脚提供的电平为高电平,其中SSM位为使能软件输入位。SSI位为设置内部管脚电平位。同理通过设置SSM和SSI位1和0则此时的NSS管脚为软件输入模式但内部管脚提供的电平为0。若从设备是一个其他的带有spi接口的芯片,并不能选择NSS管脚的方式,则可以有两种办法,一种是将NSS管脚直接接低电平。另一种就是通过主设备的任何一个gpio口去输出低电平选中从设备。
硬件输入:
主机接高电平,从机接低电平。
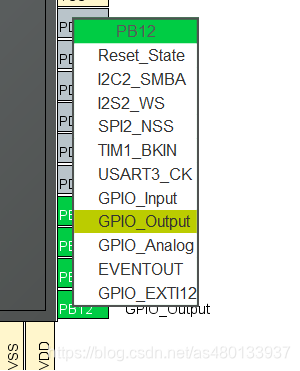
左键对应的软件片选引脚,选择GPIO_Output(输出模式),然后点击GPIO,设置一下备注。
我这里虽然PB12是SPI2的硬件片选NSS,但是我想用软件片选,所以关闭了硬件NSS
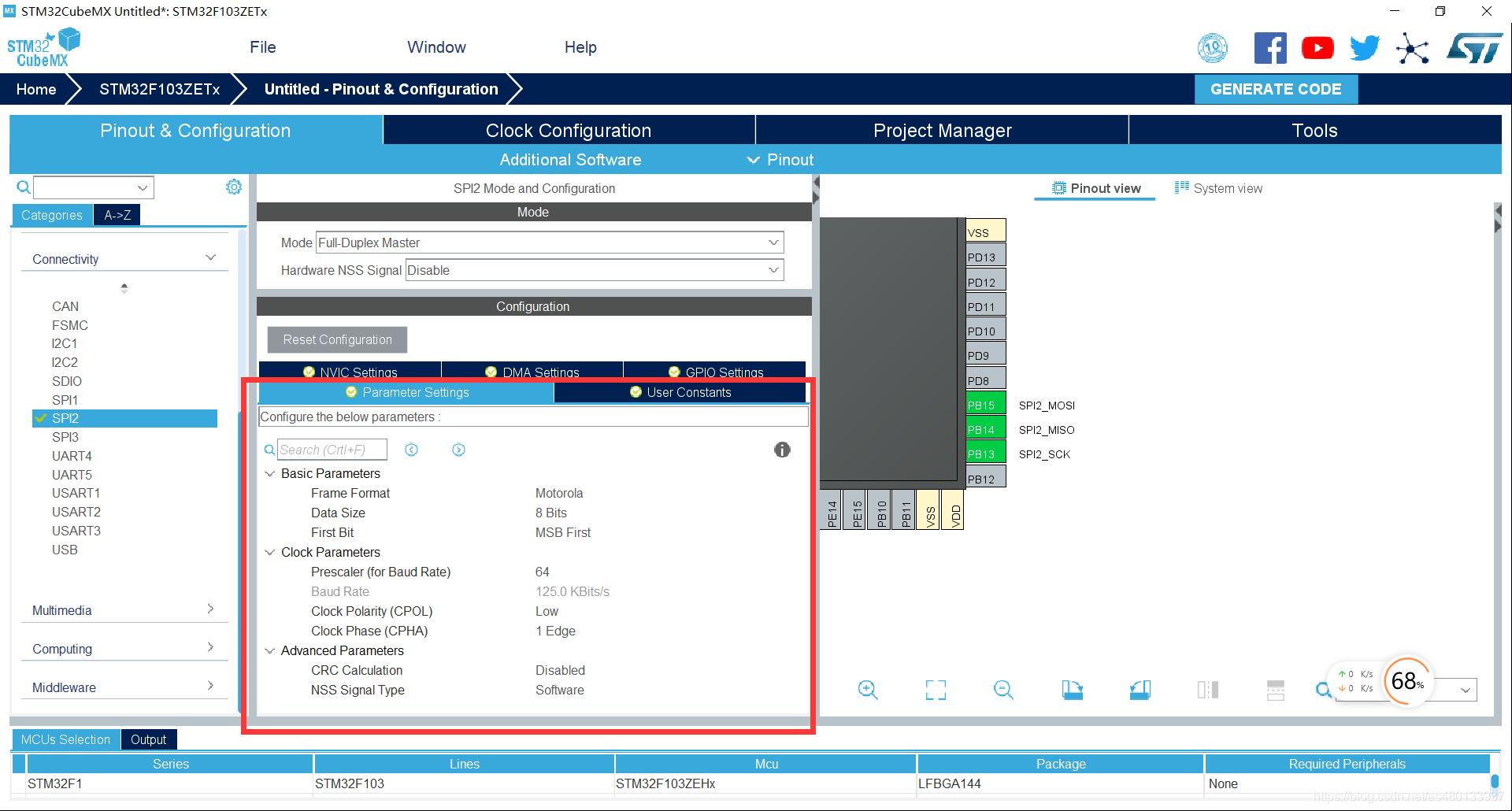
SPI配置默认如下:
SPI配置中设置数据长度为8bit,MSB先输出分频为64分频,则波特率为125KBits/s。其他为默认设置。
Motorla格式,CPOL设置为Low,CPHA设置为第一个边沿。不开启CRC检验,NSS为软件控制。
时钟源设置
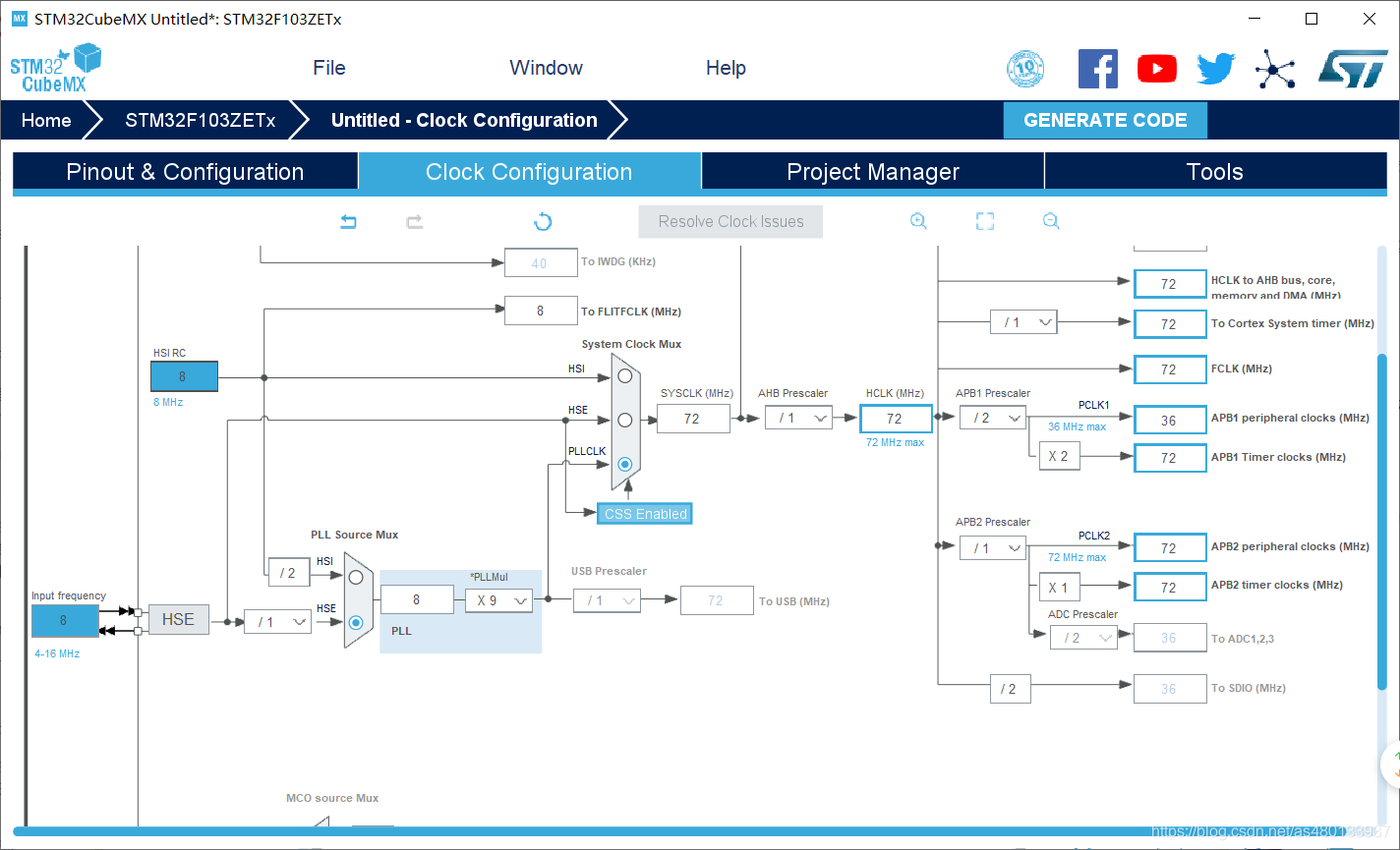
我的是 外部晶振为8MHz
- 1选择外部时钟HSE 8MHz
- 2PLL锁相环倍频9倍
- 3系统时钟来源选择为PLL
- 4设置APB1分频器为 /2
- 5 使能CSS监视时钟
SPI HAL库函数
- SPI 初始化函数
HAL_SPI_Init(SPI_HandleTypeDef *hspi)
功能:初始化 SPI 外设(配置模式、数据位宽、极性 / 相位、波特率等)
输入参数
:
hspiSPI_HandleTypeDef1
2
3
:SPI 句柄指针(1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
97
98
99
100
101
102
103
104
105
106
107
108
109
110
111
112
113
114
115
116
117
118
119
120
121
122
123
124
125
126
127
128
129
130
131
132
133
134
135
136
137
138
139
140
141
142
143
144
145
146
147
148
149
150
151
152
153
154
155
156
157
158
159
160
161
162
163
164
165
166
167
168
169
170
171
172
173
174
175
176
177
178
179
180
181
182
183
184
185
186
187
188
189
190
191
192
193
194
195
196
197
198
199
200
201
202
203
204
205
206
207
208
209
210
211
212
213
214
215
216
217
218
219
220
221
222
223
224
225
226
227
228
229
230
231
232
233
234
235
236
237
238
239
240
241
242
243
244
245
246
247
248
249
250
251
252
253
254
255
256
257
258
259
260
261
262
263
264
265
266
267
268
269
270
271
272
273
274
275
276
277
278
279
280
281
282
283
284
285
286
287
288
类型),需提前配置以下成员:
- `Instance`:SPI 外设基地址(如`SPI1`、`SPI2`)
- `Init.Mode`:工作模式(`SPI_MODE_MASTER`主机模式 / `SPI_MODE_SLAVE`从机模式)
- `Init.Direction`:数据方向(`SPI_DIRECTION_2LINES`双线全双工 / `SPI_DIRECTION_2LINES_RXONLY`双线接收 - only / `SPI_DIRECTION_1LINE`单线半双工)
- `Init.DataSize`:数据位宽(`SPI_DATASIZE_8BIT` / `SPI_DATASIZE_16BIT`)
- `Init.CLKPolarity`:时钟极性(`SPI_POLARITY_LOW`低电平空闲 / `SPI_POLARITY_HIGH`高电平空闲)
- `Init.CLKPhase`:时钟相位(`SPI_PHASE_1EDGE`第 1 个边沿采样 / `SPI_PHASE_2EDGE`第 2 个边沿采样)
- `Init.NSS`:片选控制方式(`SPI_NSS_HARD_INPUT`硬件输入 / `SPI_NSS_HARD_OUTPUT`硬件输出 / `SPI_NSS_SOFT`软件控制)
- `Init.BaudRatePrescaler`:波特率分频(如`SPI_BAUDRATEPRESCALER_2`、`SPI_BAUDRATEPRESCALER_4`等)
- `Init.FirstBit`:数据传输顺序(`SPI_FIRSTBIT_MSB`高位在前 / `SPI_FIRSTBIT_LSB`低位在前)
- `Init.TIMode`:TI 模式使能(`SPI_TIMODE_DISABLE` / `SPI_TIMODE_ENABLE`)
- `Init.CRCCalculation`:CRC 计算使能(`SPI_CRCCALCULATION_DISABLE` / `SPI_CRCCALCULATION_ENABLE`)
- `Init.CRCPolynomial`:CRC 多项式(仅当 CRC 使能时有效,如`7`、`0x1021`)
- **输出参数**:无
- **返回值**:`HAL_StatusTypeDef`(`HAL_OK`成功 / 其他错误码)
**2. SPI 反初始化函数**
`HAL_SPI_DeInit(SPI_HandleTypeDef *hspi)`
- **功能**:禁用 SPI 外设并释放相关资源(GPIO 引脚复位为默认状态)
- 输入参数
:
- `hspi`:SPI 句柄指针(已初始化)
- **输出参数**:无
- **返回值**:`HAL_StatusTypeDef`(`HAL_OK`成功 / 其他错误码)
**3. 阻塞式发送函数**
`HAL_SPI_Transmit(SPI_HandleTypeDef *hspi, const uint8_t *pData, uint16_t Size, uint32_t Timeout)`
- **功能**:通过 SPI 发送数据(阻塞模式,直到发送完成或超时)
- 输入参数
:
- `hspi`:SPI 句柄指针
- `pData`:待发送数据的缓冲区指针(`uint8_t`或`uint16_t`类型,需与`DataSize`匹配)
- `Size`:发送数据的长度(单位:个数据帧,与`DataSize`对应)
- `Timeout`:超时时间(单位:ms,如`100`)
- **输出参数**:无(数据通过 SPI 总线发送)
- **返回值**:`HAL_StatusTypeDef`(`HAL_OK`成功 / `HAL_TIMEOUT`超时 / `HAL_ERROR`错误)
**4. 阻塞式接收函数**
`HAL_SPI_Receive(SPI_HandleTypeDef *hspi, uint8_t *pData, uint16_t Size, uint32_t Timeout)`
- **功能**:通过 SPI 接收数据(阻塞模式,直到接收完成或超时)
- 输入参数
:
- `hspi`:SPI 句柄指针
- `Size`:接收数据的长度(单位:个数据帧)
- `Timeout`:超时时间(单位:ms)
- 输出参数
:
- `pData`:接收数据的缓冲区指针(用于存储接收结果)
- **返回值**:`HAL_StatusTypeDef`(`HAL_OK`成功 / `HAL_TIMEOUT`超时 / `HAL_ERROR`错误)
**5. 阻塞式全双工收发函数**
`HAL_SPI_TransmitReceive(SPI_HandleTypeDef *hspi, const uint8_t *pTxData, uint8_t *pRxData, uint16_t Size, uint32_t Timeout)`
- **功能**:同时发送和接收数据(全双工模式,阻塞式)
- 输入参数
:
- `hspi`:SPI 句柄指针
- `pTxData`:待发送数据的缓冲区指针
- `Size`:收发数据的长度(发送和接收长度相同)
- `Timeout`:超时时间(单位:ms)
- 输出参数
:
- `pRxData`:接收数据的缓冲区指针(存储接收结果)
- **返回值**:`HAL_StatusTypeDef`(`HAL_OK`成功 / `HAL_TIMEOUT`超时 / `HAL_ERROR`错误)
**6. 中断式发送函数**
`HAL_SPI_Transmit_IT(SPI_HandleTypeDef *hspi, const uint8_t *pData, uint16_t Size)`
- **功能**:通过 SPI 发送数据(中断模式,函数立即返回,发送完成后触发回调)
- 输入参数
:
- `hspi`:SPI 句柄指针
- `pData`:待发送数据的缓冲区指针
- `Size`:发送数据的长度
- **输出参数**:无
- **返回值**:`HAL_StatusTypeDef`(`HAL_OK`启动成功 / 其他错误码)
- **回调函数**:发送完成后触发`HAL_SPI_TxCpltCallback(hspi)`
**7. 中断式接收函数**
`HAL_SPI_Receive_IT(SPI_HandleTypeDef *hspi, uint8_t *pData, uint16_t Size)`
- **功能**:通过 SPI 接收数据(中断模式,函数立即返回,接收完成后触发回调)
- 输入参数
:
- `hspi`:SPI 句柄指针
- `Size`:接收数据的长度
- 输出参数
:
- `pData`:接收数据的缓冲区指针
- **返回值**:`HAL_StatusTypeDef`(`HAL_OK`启动成功 / 其他错误码)
- **回调函数**:接收完成后触发`HAL_SPI_RxCpltCallback(hspi)`
**8. 中断式全双工收发函数**
`HAL_SPI_TransmitReceive_IT(SPI_HandleTypeDef *hspi, const uint8_t *pTxData, uint8_t *pRxData, uint16_t Size)`
- **功能**:全双工收发数据(中断模式,完成后触发回调)
- 输入参数
:
- `hspi`:SPI 句柄指针
- `pTxData`:待发送数据的缓冲区指针
- `Size`:收发数据的长度
- 输出参数
:
- `pRxData`:接收数据的缓冲区指针
- **返回值**:`HAL_StatusTypeDef`(`HAL_OK`启动成功 / 其他错误码)
- **回调函数**:完成后触发`HAL_SPI_TxRxCpltCallback(hspi)`
**9. DMA 模式发送函数**
`HAL_SPI_Transmit_DMA(SPI_HandleTypeDef *hspi, const uint8_t *pData, uint16_t Size)`
- **功能**:通过 DMA 发送 SPI 数据(非阻塞,DMA 完成后触发回调)
- 输入参数
:
- `hspi`:SPI 句柄指针(需提前配置 DMA 相关参数)
- `pData`:待发送数据的缓冲区指针
- `Size`:发送数据的长度
- **输出参数**:无
- **返回值**:`HAL_StatusTypeDef`(`HAL_OK`启动成功 / 其他错误码)
- **回调函数**:发送完成后触发`HAL_SPI_TxCpltCallback(hspi)`
**10. DMA 模式接收函数**
`HAL_SPI_Receive_DMA(SPI_HandleTypeDef *hspi, uint8_t *pData, uint16_t Size)`
- **功能**:通过 DMA 接收 SPI 数据(非阻塞,DMA 完成后触发回调)
- 输入参数
:
- `hspi`:SPI 句柄指针(需配置 DMA)
- `Size`:接收数据的长度
- 输出参数
:
- `pData`:接收数据的缓冲区指针
- **返回值**:`HAL_StatusTypeDef`(`HAL_OK`启动成功 / 其他错误码)
- **回调函数**:接收完成后触发`HAL_SPI_RxCpltCallback(hspi)`
**11. 中止传输函数**
`HAL_SPI_Abort(SPI_HandleTypeDef *hspi)`
- **功能**:中止当前 SPI 传输(适用于阻塞模式)
- 输入参数
:
- `hspi`:SPI 句柄指针
- **输出参数**:无
- **返回值**:`HAL_StatusTypeDef`(`HAL_OK`成功 / 其他错误码)
**12. 中止中断 / DMA 传输函数**
`HAL_SPI_Abort_IT(SPI_HandleTypeDef *hspi)`
- **功能**:中止当前中断或 DMA 模式下的 SPI 传输
- 输入参数
:
- `hspi`:SPI 句柄指针
- **输出参数**:无
- **返回值**:`HAL_StatusTypeDef`(`HAL_OK`成功 / 其他错误码)
**说明**
- 函数中的`uint8_t *pData`参数:若 SPI 配置为 16 位数据(`SPI_DATASIZE_16BIT`),需强制转换为`uint16_t *`类型使用。
- 超时时间(`Timeout`):阻塞模式下,超过该时间未完成操作则返回`HAL_TIMEOUT`。
- 回调函数:用户需在应用中重写(如`HAL_SPI_TxCpltCallback`),实现传输完成后的自定义逻辑。
## W25Q128例程
**用到的相关指令**
| ***\*指令\**** | ***\*名称\**** | ***\*解释\**** |
| -------------- | -------------------- | -------------------------------------------- |
| 02h | Page Program | 页编程,在一页上写字 |
| 03h | Read Data | 读取数据 |
| 05h | Read Status Register | 读取寄存器状态 |
| 06h | Write Enable | 将状态寄存器中的写启用闩锁(WEL)位设置为1。 |
| 20h | Sector Erase | 扇区擦除 |
| C7h/60h | Chip Erase | 整个芯片擦除 |
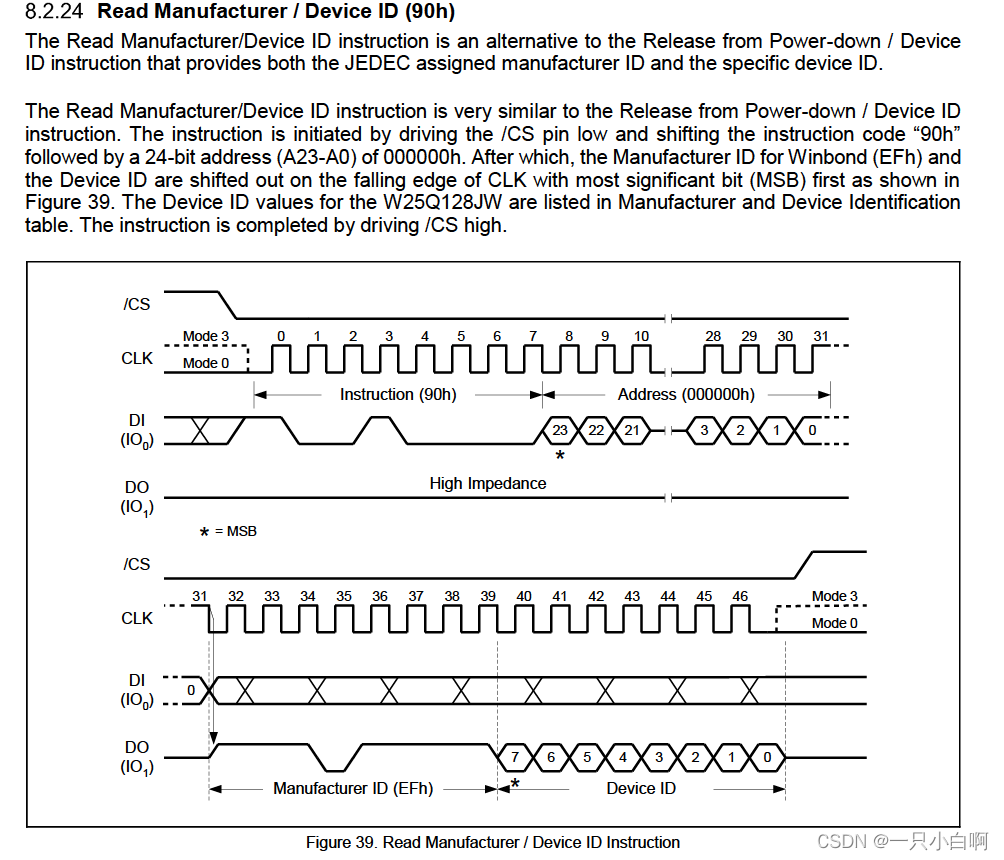
**读取设备ID(举一个例子,其他指令对照芯片手册看即可)**
读取设备ID指令根据数据手册,发送0X90+24位地址之后,就可以接收到0XEF + ID,W25Q128的ID为0X17。read_W25Q128_ID()函数可以通过串口打印ID,或者通过单步调试Debug直接查看读到的ID值。
可以理解为MCU向W25Q128发送命令0x90 0x00 0x00 0x00 ,然后就可以接收到W25Q128的两个字节 0xEF 0x17
```C
// 读取 ID 测试 OK 0xEF 0X17
void read_W25Q128_ID()
{
uint8_t _RxData[2]={0x00};
W25Q128_Enable();
//发送指令
spi2_Transmit_one_byte(0x90);
spi2_Transmit_one_byte(0x00);
spi2_Transmit_one_byte(0x00);
spi2_Transmit_one_byte(0x00);
//接收数据
_RxData[0] = spi2_Receive_one_byte();
_RxData[1] = spi2_Receive_one_byte();
W25Q128_Disable();
printf("%s\r\n",_RxData); //串口打印 ID
}
读、写、擦除操作
读、写、擦除操作的24位地址取值范围是0-16777216,因为读可以从指定地址一直读到最后,而写,一次最多写一页,擦除的最小单位为一个扇区4096个字即16页,当然也可以一不做二不休整个芯片擦除,这个擦除时间比较长十几秒,因为是自学,所以总得做点什么。比如:
1、写10个数,卡在第一页和第二页之间,即第一页写5个数第二页写5个数。
2、写10个数,卡在第一个扇区和第二个扇区之间,即第255页写5个数第256页写5个 数。
问题点:第一个问题,就要考虑翻页写的问题,第二个问题就要考虑擦除两个扇区和翻页写的问题。
解决思路:
1、通过地址定位到当页还剩下多少个字可以写,通过要写字的个数,分为几次写,写完当页后再翻页写到下一页,直到写完。相关函数:
Write_Page() Write_Word()
2、因为要先进行擦除,然后再写数据,才能保证写入数据的准确性,可以直接擦除整个芯片,要想时间最快,擦除部分应该是最小的,所以选择擦除扇区。通过地址和要写字的个数,就可以判断,要写的地方在哪几个扇区,然后执行擦除即可。相关函数:
Erase_Write_data_Sector() Erase_one_Sector()
驱动代码
W25Q28.c文件
1 | |
W25Q28.h文件
1 | |