
本系列主要讲解STM32CubeHAL的使用,详细的安装部署教程请见【STM32】STM32 CubeMx使用教程一–安装教程-CSDN博客
PWM原理详情请见标准库笔记
工程创建
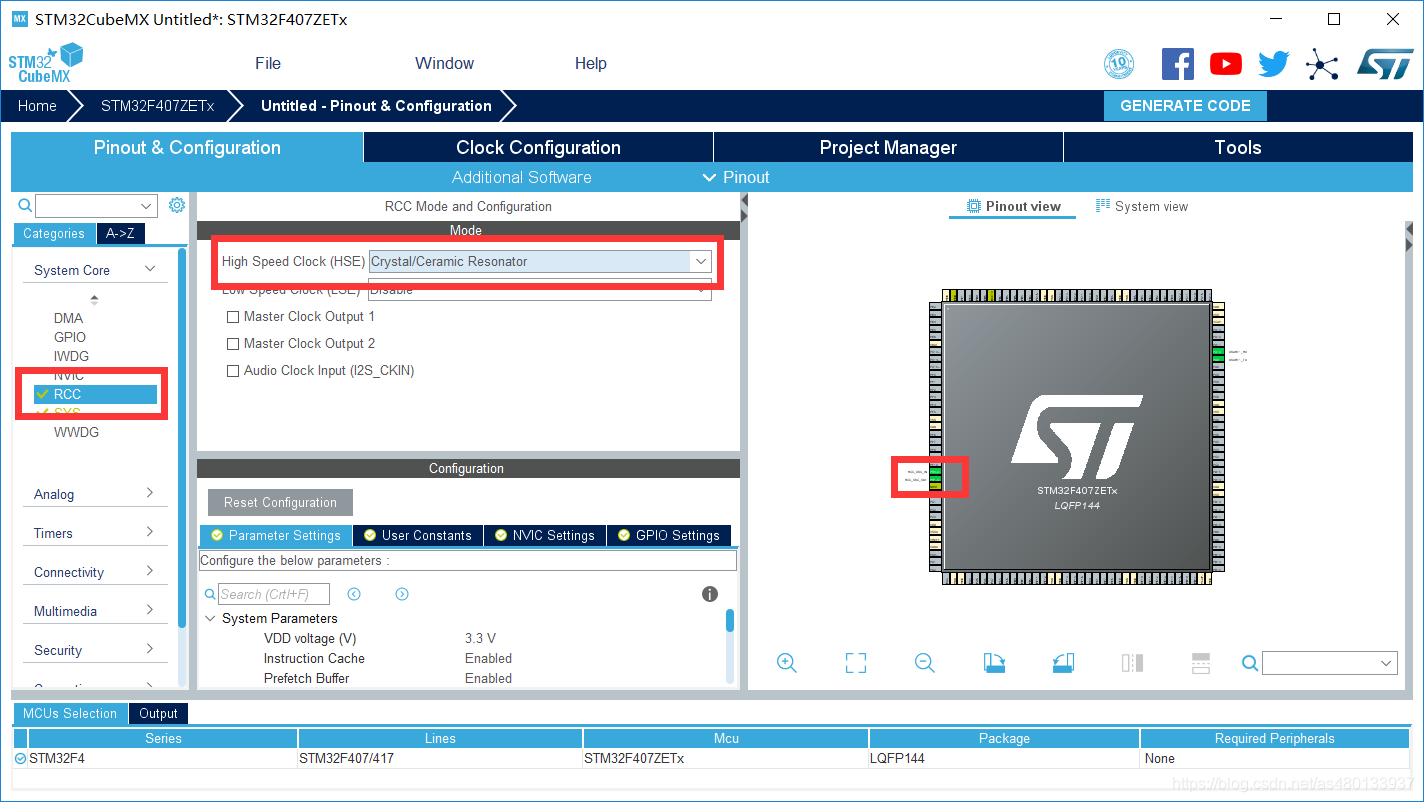
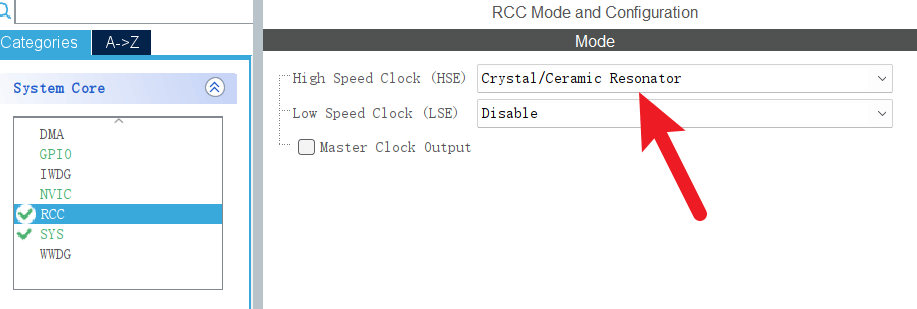
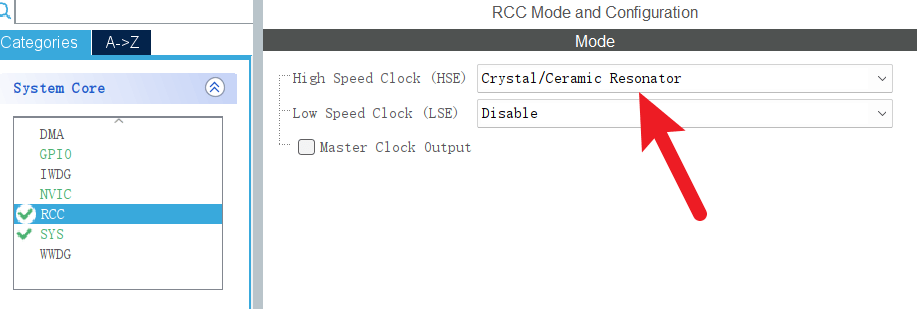
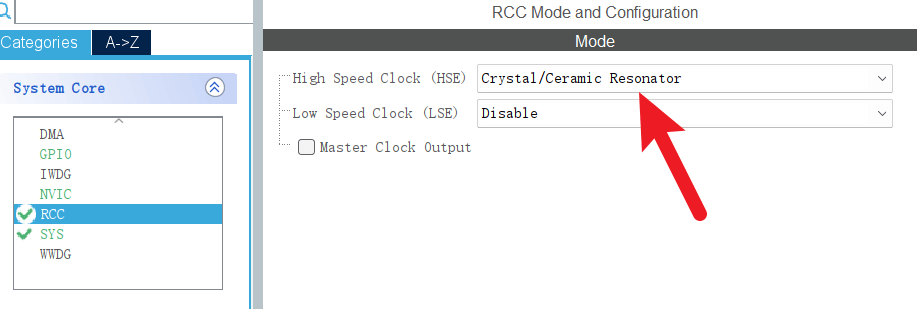
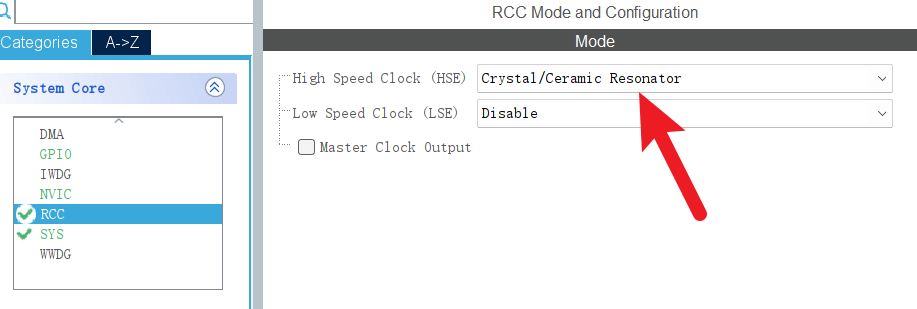
1设置RCC
设置高速外部时钟HSE 选择外部时钟源
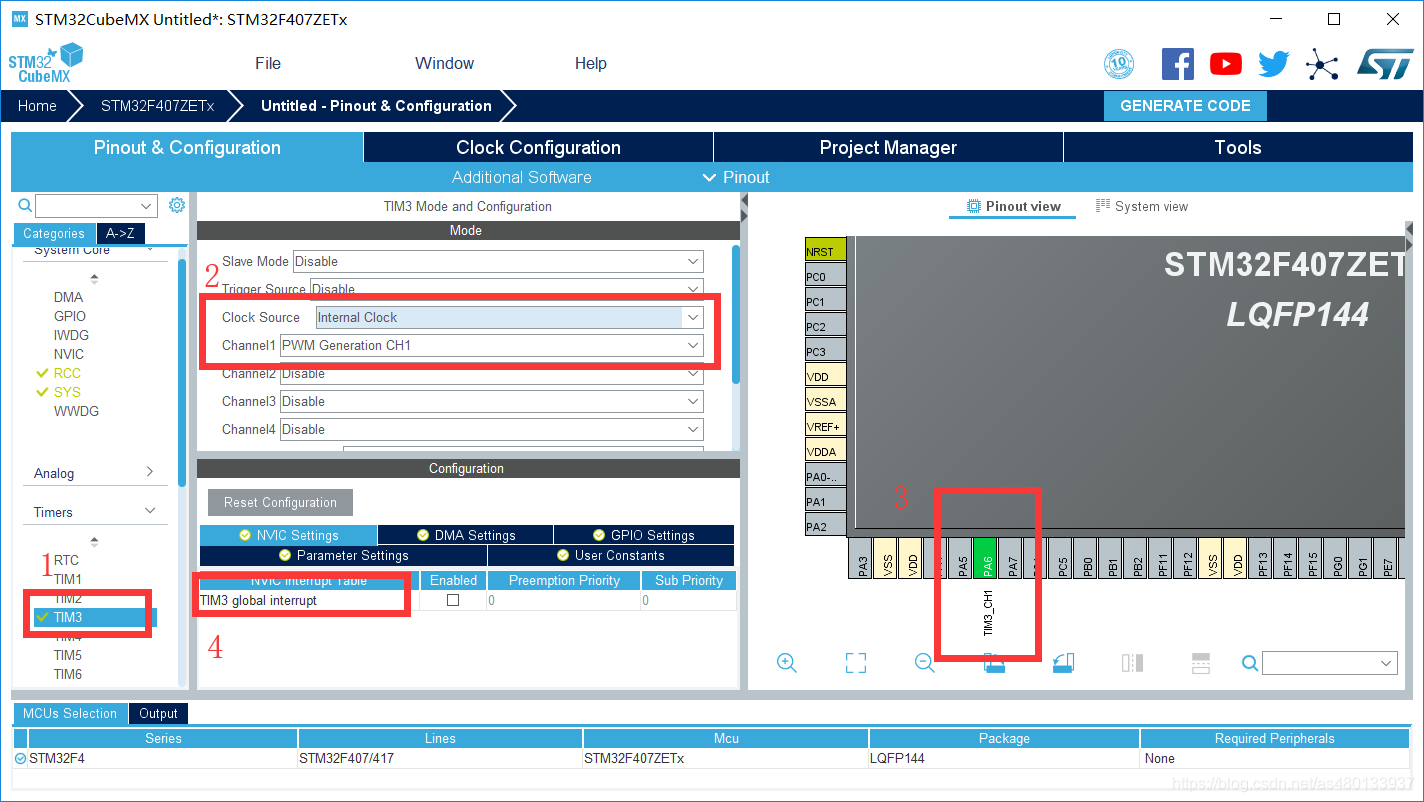
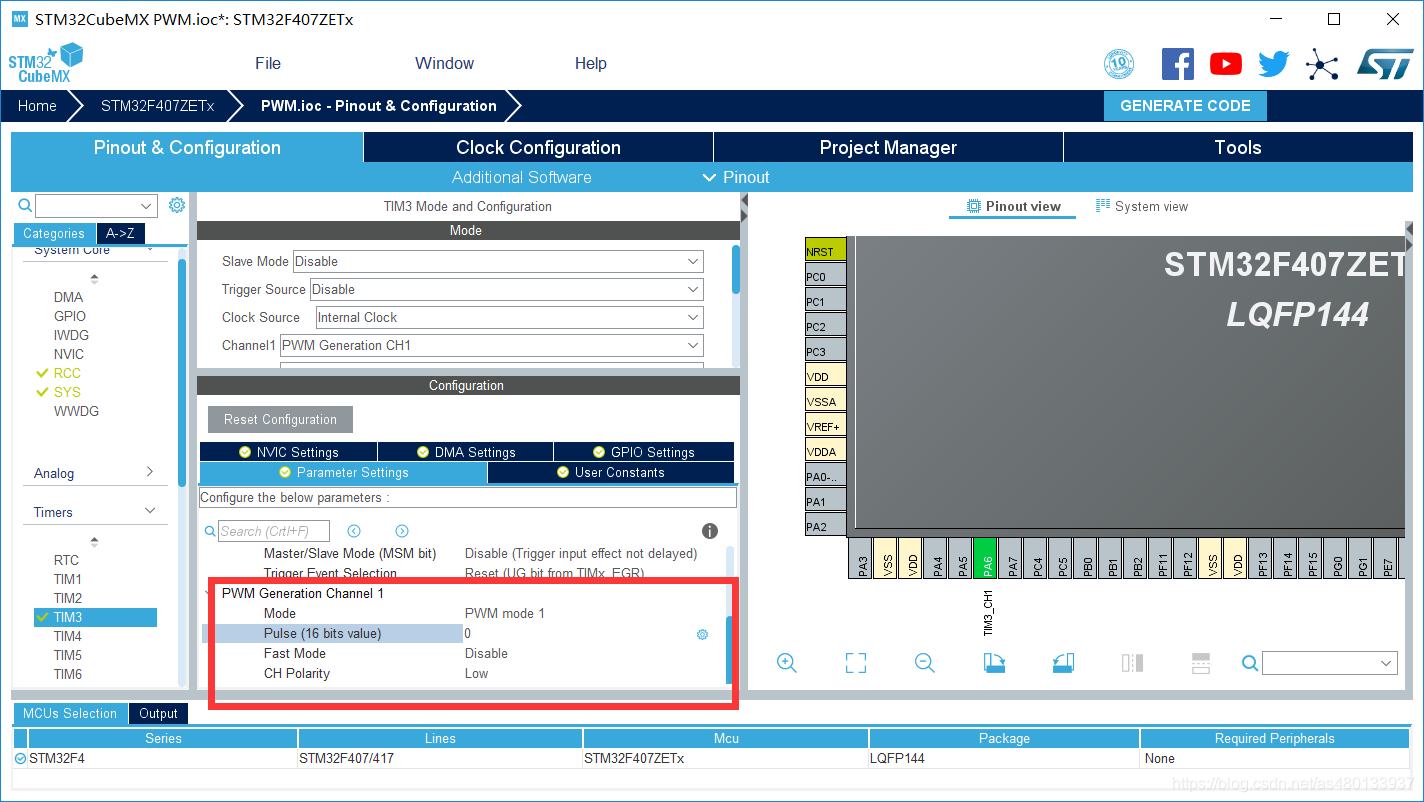
2设置定时器
- 1.选择TIM3
- 2.设置定时器时钟源为内部时钟源
- 设置定时器CH1为PWM模式
- 3.对应管脚自动设置为复用模式
- 4.可自行选择是否开启定时器中断
Channel1~4 就是设置定时器通道的功能 (输入捕获、输出比较、PWM输出、单脉冲模式)
- Mode 选择PWM模式1
- Pulse(占空比值) 先给0
- Fast Mode PWM脉冲快速模式 : 和我们配置无关,不使能
- PWM 极性: 设置为低电平 PS: 由于LED是低电平点亮,所以我们把极性设置为low
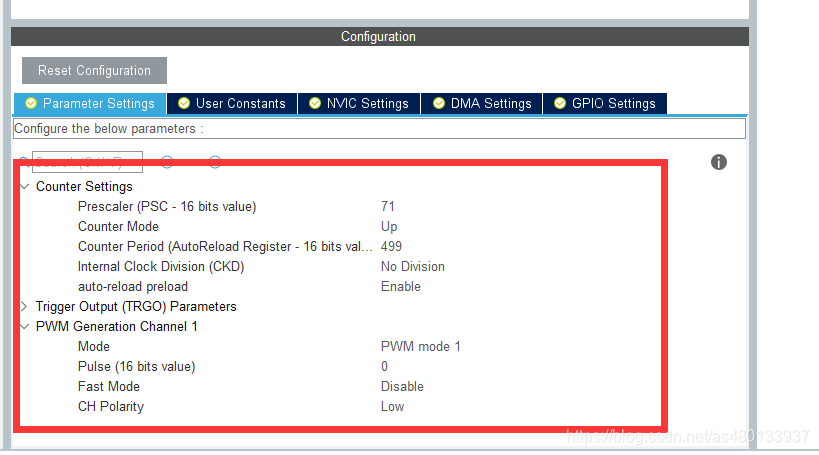
在 Parameter Settings 页配置预分频系数为 71,计数周期(自动加载值)为 499,定时器溢出频率,即PWM的周期,就是 72MHz/(71+1)/(499+1) = 2kHz
PWM频率:
Fpwm =Tclk / ((arr+1)*(psc+1))(单位:Hz)
- arr 是计数器值
- psc 是预分频值
占空比:
- duty circle = TIM3->CCR1 / arr(单位:%)
- TIM3->CCR1 用户设定值
比如 定时器频率Tclk = 72Mhz arr=499 psc=71 那么PWM频率就是720000/500/72= 2000Hz,即2KHz
arr=499,TIM3->CCR1=250 则pwm的占空比为50%
改CCR1可以修改占空比,修改arr可以修改频率
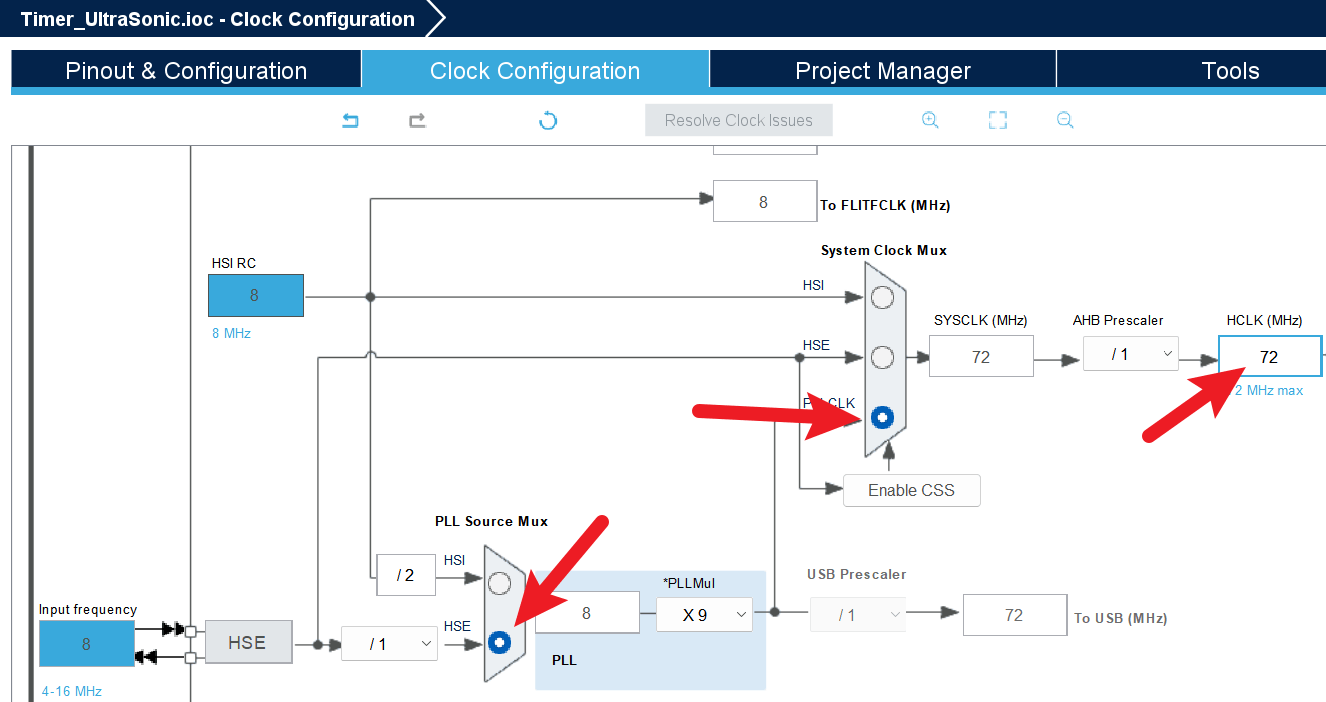
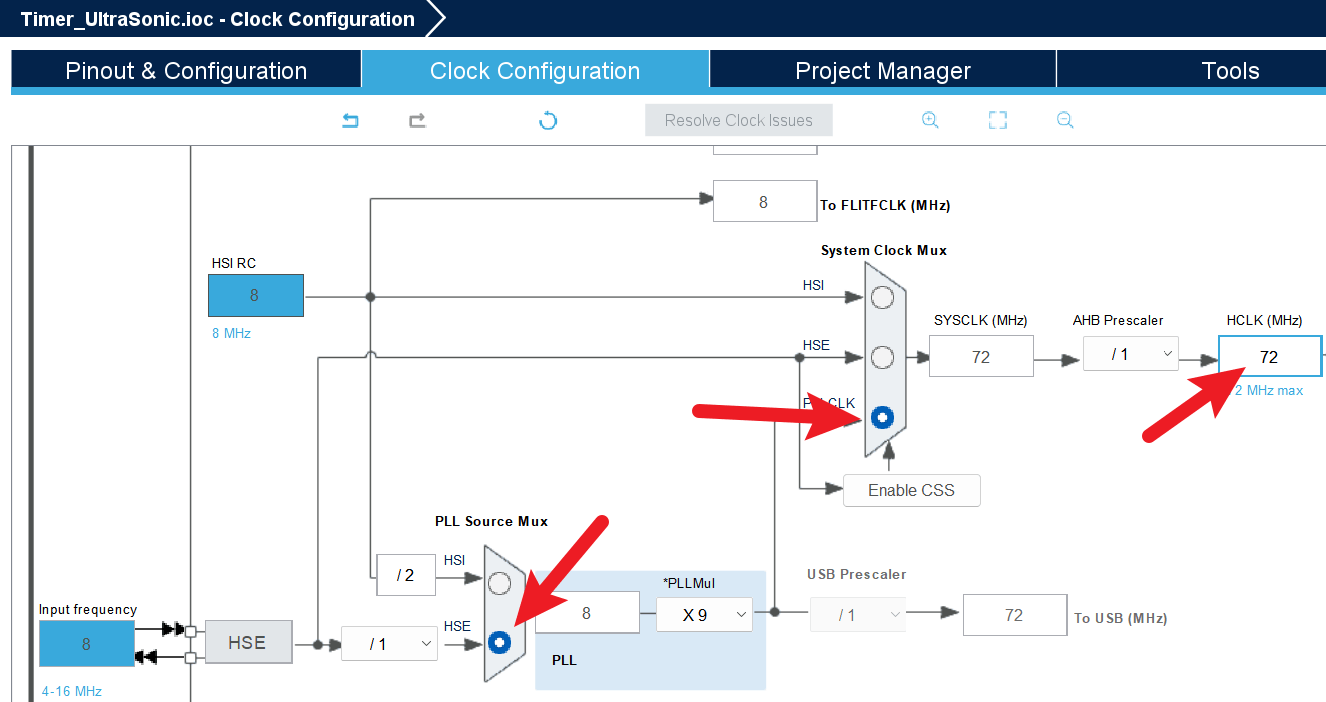
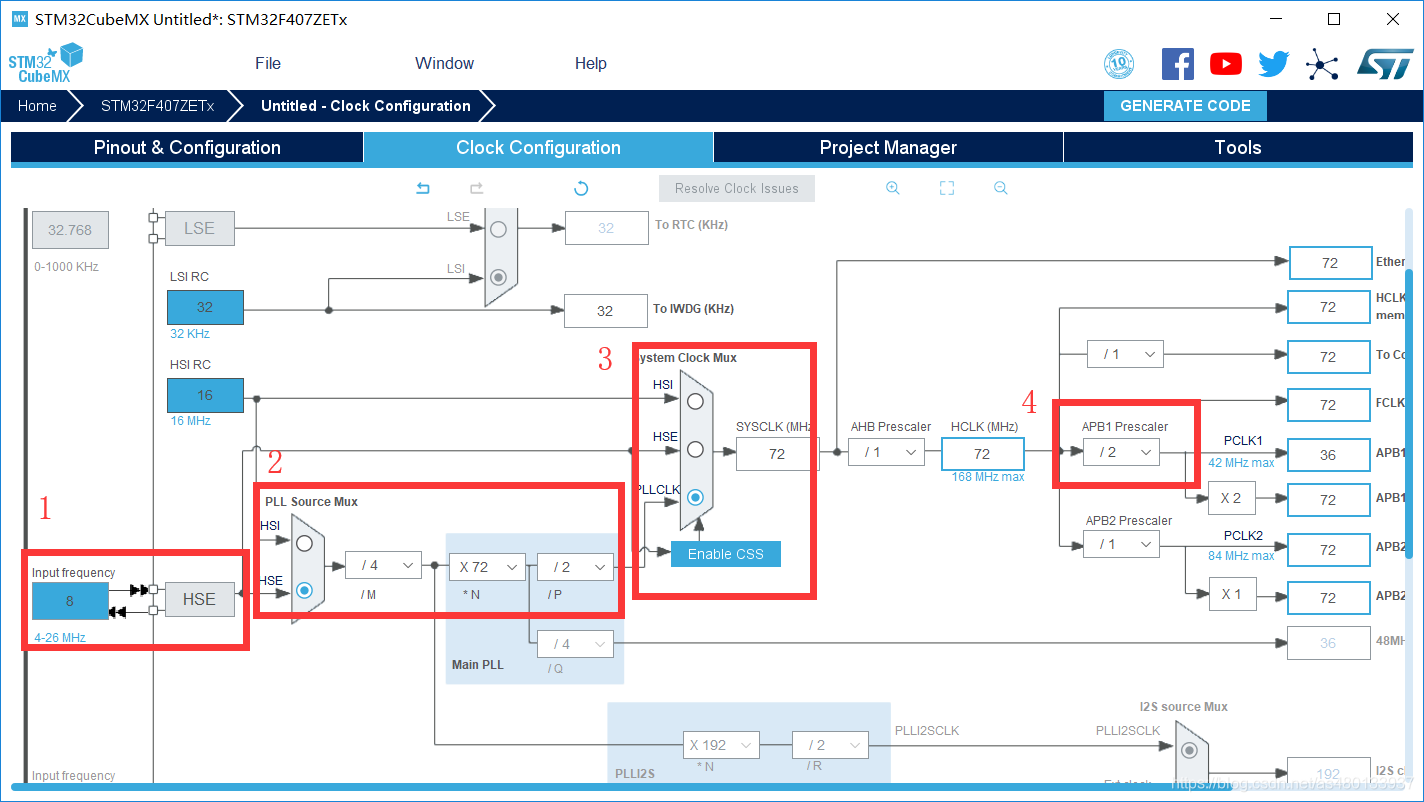
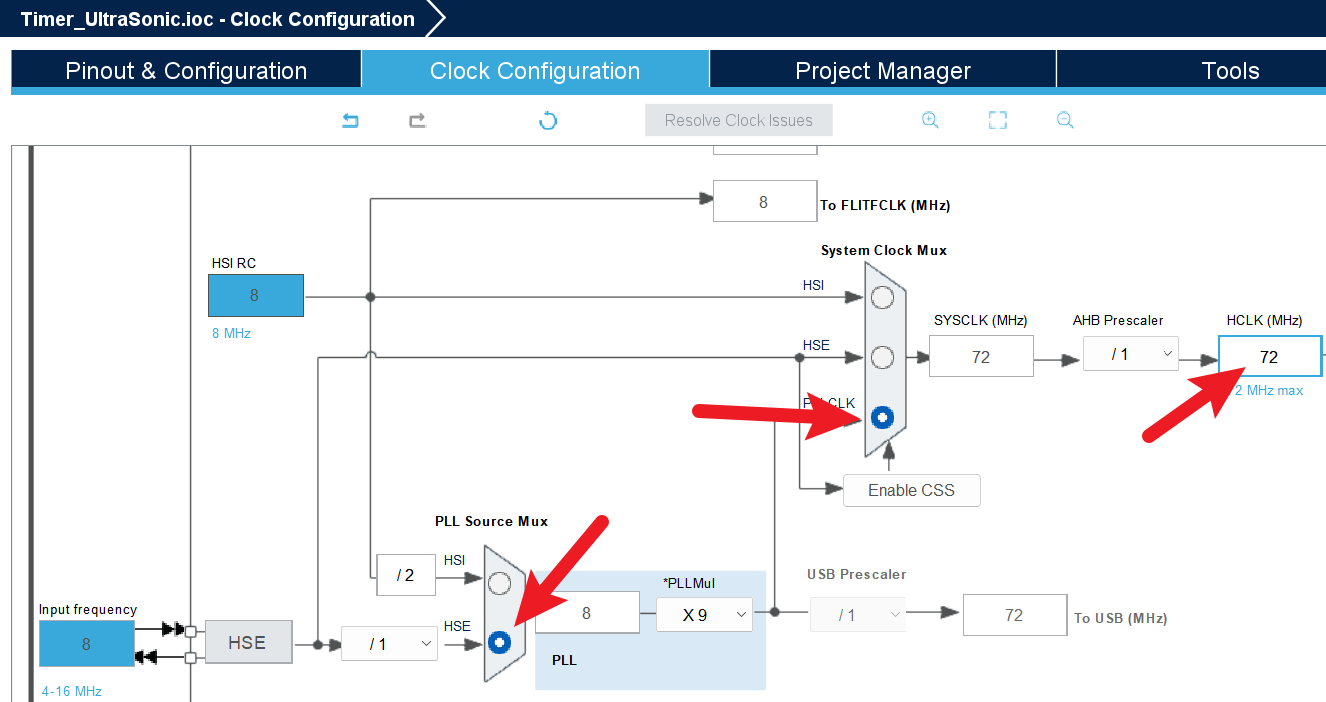
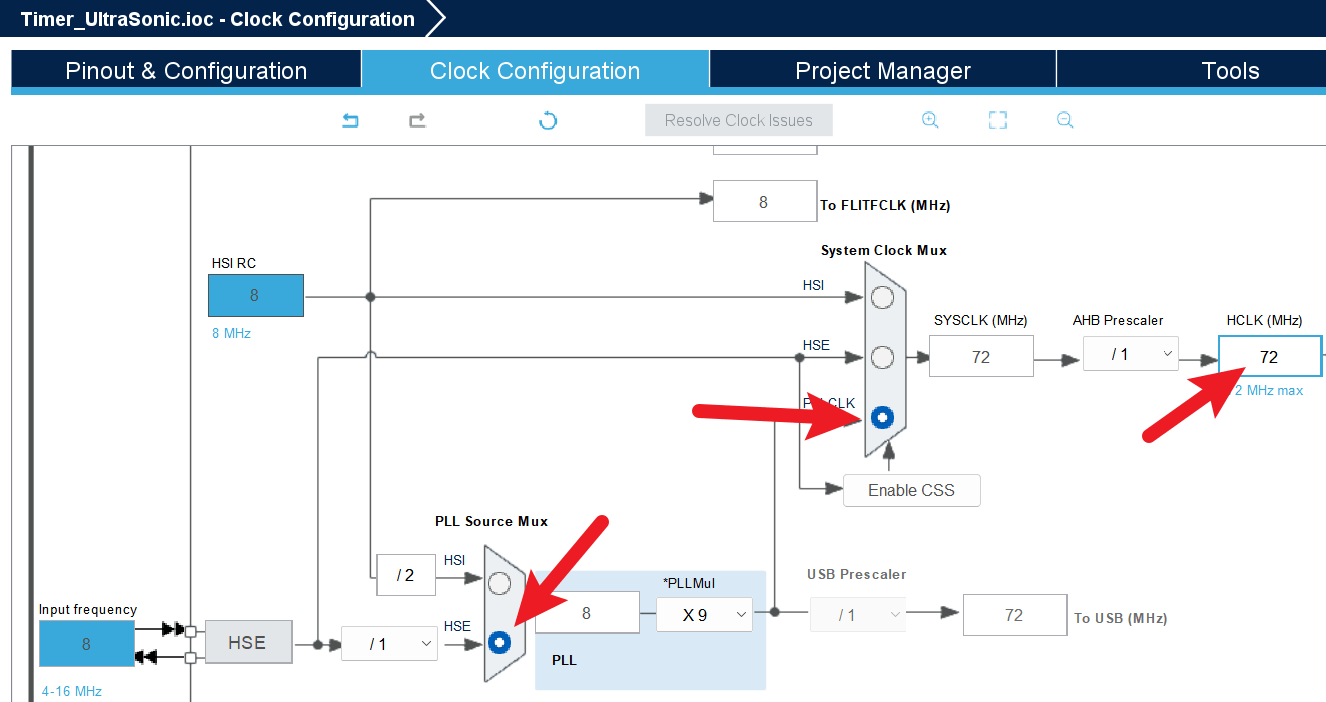
3时钟源设置
- 1选择外部时钟HSE 8MHz
- 2PLL锁相环倍频72倍
- 3系统时钟来源选择为PLL
- 4设置APB1分频器为 /2
呼吸灯
1、工程配置
- 开启外部晶振:在Pinout&Configuration -> System Core -> RCC 页面,将 High Speed Clock (HSE) 配置为 Crystal/Ceramic Resonator
- 配置时钟频率:在Clock Configuration 页面,将PLL Source 选择为 HSE,将System Clock Mux 选择为 PLLCLK,然后在HCLK (MHz) 输入72并回车,将HCLK频率配置为 72 MHz
分配引脚:在Pinout&Configuration页面,将PA6、PA7、PB0分别配置为TIM3_CH1、TIM3_CH2、TIM3_CH3
配置TIM3:在Pinout&Configuration -> Timers -> TIM3
勾选 Internal Clock,开启 TIM3 的内部时钟源
Configuration -> Mode,将 Channel1、Channel2、Channel3 分别配置为 PWM Generation CH1、2、3
Configuration -> Parameter Settings -> Counter Settings,将 Prescaler 配置为 72-1,将 Counter Period 配置为 100-1,使PWM频率为10kHz
PWM频率 = 72MHz ÷ 72 ÷ 100 = 10 kHz
2、代码
启动PWM输出
1
2
3
4//启动3个通道的PWM输出
HAL_TIM_PWM_Start(&htim3, TIM_CHANNEL_1);
HAL_TIM_PWM_Start(&htim3, TIM_CHANNEL_2);
HAL_TIM_PWM_Start(&htim3, TIM_CHANNEL_3);在while循环中逐渐改变占空比
__HAL_TIM_SET_COMPARE可以设置PWM的占空比,范围 0 - 99注意:占空比必须小于前面配置的Counter Period,例程中配置为100-1,即占空比可调范围是 0 - 99
先从0逐渐增加到99,亮度逐渐提高
再从99逐渐减小到0,亮度逐渐降低
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19while (1) {
// PWM通道CH1-3分别对应三个颜色,下面示例三个颜色一起呼吸灯
// 0-99为占空比,0为最小亮度,99为最大亮度
// 每7ms调整一次占空比,从0逐渐增加到99
for (int period = 0; period < 100; period++) {
__HAL_TIM_SET_COMPARE(&htim3, TIM_CHANNEL_1, period);
__HAL_TIM_SET_COMPARE(&htim3, TIM_CHANNEL_2, period);
__HAL_TIM_SET_COMPARE(&htim3, TIM_CHANNEL_3, period);
HAL_Delay(7);
}
// 从99逐渐减小到0
for (int period = 99; period >= 0; period--) {
__HAL_TIM_SET_COMPARE(&htim3, TIM_CHANNEL_1, period);
__HAL_TIM_SET_COMPARE(&htim3, TIM_CHANNEL_2, period);
__HAL_TIM_SET_COMPARE(&htim3, TIM_CHANNEL_3, period);
HAL_Delay(7);
}
HAL_Delay(100);
}
舵机控制
SG-90 舵机简介
舵机最早是应用于遥控模型的小型执行器,因此也称为RC舵机。它有一个输出轴,可以连接摇臂,通过输入信号就能控制摇臂的运动。
与电机不同的是,它可以准确的控制摇臂旋转到某一个指定位置,并且自动抵抗外力,维持位置。
除了RC模型,舵机可以用于双足机器人、机械臂、自动化执行器(阀门、门窗等等)
注意:舵机内部是塑料减速齿轮,不可大力掰摇臂,避免损坏齿轮
舵机的输入信号为 50Hz 的PWM波,其占空比范围 **2.5%
12.5%**,分别对应 **0°180°**位置。因此,调整PWM占空比即可控制舵机的角度。
1、工程配置
- 开启外部晶振:在Pinout&Configuration -> System Core -> RCC 页面,将 High Speed Clock (HSE) 配置为 Crystal/Ceramic Resonator
- 配置时钟频率:在Clock Configuration 页面,将PLL Source 选择为 HSE,将System Clock Mux 选择为 PLLCLK,然后在HCLK (MHz) 输入72并回车,将HCLK频率配置为 72 MHz
分配引脚:在Pinout&Configuration页面,将PB8配置为TIM4_CH3
配置TIM4:在Pinout&Configuration -> Timers -> TIM4
Configuration -> Mode,勾选Internal Clock,开启 TIM4 的内部时钟源
Configuration -> Mode,将 Channel3 配置为 PWM Generation CH3
Configuration -> Parameter Settings -> Counter Settings,将 Prescaler 配置为 720-1,将Counter Period 配置为 2000-1,此时PWM频率为 50 Hz
PWM频率 = 72 MHz ÷ 720 ÷ 2000 = 50 Hz
2、代码
启动PWM输出:
HAL_TIM_PWM_Start(&htim4, TIM_CHANNEL_3)启动PWM输出舵机控制:
舵机角度受占空比控制,占空比 2.5%
12.5% 代表 0°180°占空比通过
__HAL_TIM_SET_COMPARE调节,参数范围 50~250占空比 = Compare寄存器值 ÷ Counter Period计数周期
因此,
__HAL_TIM_SET_COMPARE填入的值 = 占空比 * Counter Period例如,设置占空比为2.5%、12.5%时,2.5% * 2000 = 50,2.5% * 2000 = 250
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17while (1)
{
// 舵机控制占空比范围2.5% ~ 12.5%
// Counter Period设置的是2000,因此占空比设置范围是50 ~ 250
// 中点,占空比7.5%,即2000 * 7.5% = 150
__HAL_TIM_SET_COMPARE(&htim4, TIM_CHANNEL_3, 150);
HAL_Delay(1000);
// 向左转,占空比2.5%,即2000 * 2.5% = 50
__HAL_TIM_SET_COMPARE(&htim4, TIM_CHANNEL_3, 50);
HAL_Delay(1000);
// 向右转,占空比12.5%,即2000 * 12.5% = 250
__HAL_TIM_SET_COMPARE(&htim4, TIM_CHANNEL_3, 250);
HAL_Delay(1000);
}
【PWM】无源蜂鸣器
1、工程配置
- 开启外部晶振:在Pinout&Configuration -> System Core -> RCC 页面,将 High Speed Clock (HSE) 配置为 Crystal/Ceramic Resonator
- 配置时钟频率:在Clock Configuration 页面,将PLL Source 选择为 HSE,将System Clock Mux 选择为 PLLCLK,然后在HCLK (MHz) 输入72并回车,将HCLK频率配置为 72 MHz
- 分配引脚:在Pinout&Configuration页面,配置如下引脚
- 将PB9配置为TIM4_CH4,
- 将PB12、PB13设置为GPIO_Input,并分别设置User Label为KEY1、KEY2
- 配置GPIO:在Pinout&Configuration -> GPIO,将PB13的GPIO Pull-up/Pull-down配置为Pull-up
- 配置TIM4:在Pinout&Configuration -> Timers -> TIM4
- 勾选 Internal Clock,开启 TIM4 的内部时钟源
- Configuration -> Mode,将 Channel4 配置为 PWM Generation CH4
- Configuration -> Parameter Settings -> Counter Settings,将 Prescaler 配置为 72-1
2、代码
启动PWM输出
1
HAL_TIM_PWM_Start(&htim4, TIM_CHANNEL_4);在while循环中检测按键并输出相应的频率
htim4.Instance->ARR = 500可以将 TIM4 的 Counter Period 设置为 500此时,PWM频率 = 72 MHz ÷ 72 ÷ 500 = 2 kHz
__HAL_TIM_SET_COMPARE可以设置PWM的占空比,将占空比设为 20%,可以确保声音清脆明亮注意:占空比必须小于前面配置的Counter Period,例程中配置为100-1,即占空比可调范围是 0 - 99
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21while (1)
{
// KEY1按下: 输出2kHz声波
if (!HAL_GPIO_ReadPin(KEY1_GPIO_Port, KEY1_Pin))
{
htim4.Instance->ARR = 500; // 2kHz = 72MHz / 72 / 500
__HAL_TIM_SET_COMPARE(&htim4, TIM_CHANNEL_4, htim4.Instance->ARR / 5); // 20%占空比
}
// KEY2按下: 输出3kHz声波
else if (!HAL_GPIO_ReadPin(KEY2_GPIO_Port, KEY2_Pin))
{
htim4.Instance->ARR = 334; // 3kHz = 72MHz / 72 / 334
__HAL_TIM_SET_COMPARE(&htim4, TIM_CHANNEL_4, htim4.Instance->ARR / 5); // 20%占空比
}
// 否则: 关闭声波输出
else
{
__HAL_TIM_SET_COMPARE(&htim4, TIM_CHANNEL_4, 0);
}
HAL_Delay(100);
}
直流电机(DRV8833 电机)
1、工程配置
- 开启外部晶振:在Pinout&Configuration -> System Core -> RCC 页面,将 High Speed Clock (HSE) 配置为 Crystal/Ceramic Resonator
- 配置时钟频率:在Clock Configuration 页面,将PLL Source 选择为 HSE,将System Clock Mux 选择为 PLLCLK,然后在HCLK (MHz) 输入72并回车,将HCLK频率配置为 72 MHz
- 分配引脚:在Pinout&Configuration页面,配置如下引脚
- 将PA0、PA1分别配置为TIM2_CH1、TIM2_CH2
- 将PB12、PB13设置为GPIO_Input,并分别设置User Label为KEY1、KEY2
- 配置GPIO:在Pinout&Configuration -> GPIO,将PB13的GPIO Pull-up/Pull-down配置为Pull-up
- 配置TIM2:在Pinout&Configuration -> Timers -> TIM2
- Configuration -> Mode -> Clock Source 选择 Internal Clock,开启 TIM2 的内部时钟源
- Configuration -> Mode,将 Channel1、Channel2 分别配置为 PWM Generation CH1、2
- Configuration -> Parameter Settings -> Counter Settings,将 Prescaler 配置为 72-1,将Counter Period 配置为 100-1,此时PWM频率为 10 kHz
2、代码
逻辑功能:在while循环中检测按键并输出相应的占空比:
- 按下KEY1,启动PWM输出,占空比配置为99%,风扇高速运转
- 按下KEY2,启动PWM输出,占空比配置为85%,风扇中速运转
- 没有按键按下,关闭PWM输出,风扇停止
转速控制:
__HAL_TIM_SET_COMPARE(&htim2, TIM_CHANNEL_1, 99)设置PWM的占空比越高,转速越快
注意
占空比过低时,电机可能无法启动。建议先从 99 占空比开始测试。
提示
由于我们配置的 Counter Period 为 100-1,因此占空比最高可以设置为 99,而非 100
正/反方向控制:
- 配置了CH1、CH2两路PWM输出,但每次只需要启动1路PWM输出,这代表了不同的旋转方向。
- 例如,
HAL_TIM_PWM_Start(&htim2, TIM_CHANNEL_1)启动TIM2_CH1,电机正转;如果启动CH2,则电机反转 - 当需要转换方向,或者需要停止时,可以调用
HAL_TIM_PWM_Stop(&htim2, TIM_CHANNEL_1)停止PWM输出
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25while (1)
{
// KEY1按下:占空比99% 高速正转
if (HAL_GPIO_ReadPin(KEY1_GPIO_Port, KEY1_Pin) == GPIO_PIN_RESET)
{
// 启动PWM通道1输出(只能同时启动1个通道,两个通道对应正/反转)
HAL_TIM_PWM_Start(&htim2, TIM_CHANNEL_1);
// 配置通道1的占空比,影响电机转速(占空比过低可能导致电机无法启动)
__HAL_TIM_SET_COMPARE(&htim2, TIM_CHANNEL_1, 99);
}
// KEY2按下:占空比85% 中速正转
else if (HAL_GPIO_ReadPin(KEY2_GPIO_Port, KEY2_Pin) == GPIO_PIN_RESET)
{
// 启动PWM通道1输出(只能同时启动1个通道,两个通道对应正/反转)
HAL_TIM_PWM_Start(&htim2, TIM_CHANNEL_1);
// 配置通道1的占空比,影响电机转速(占空比过低可能导致电机无法启动)
__HAL_TIM_SET_COMPARE(&htim2, TIM_CHANNEL_1, 85);
}
else
{
// 停止PWM通道1输出
HAL_TIM_PWM_Stop(&htim2, TIM_CHANNEL_1);
}
HAL_Delay(100);
}