
本系列主要讲解STM32CubeHAL的使用,详细的安装部署教程请见【STM32】STM32 CubeMx使用教程一–安装教程-CSDN博客
零、Cube MX的使用
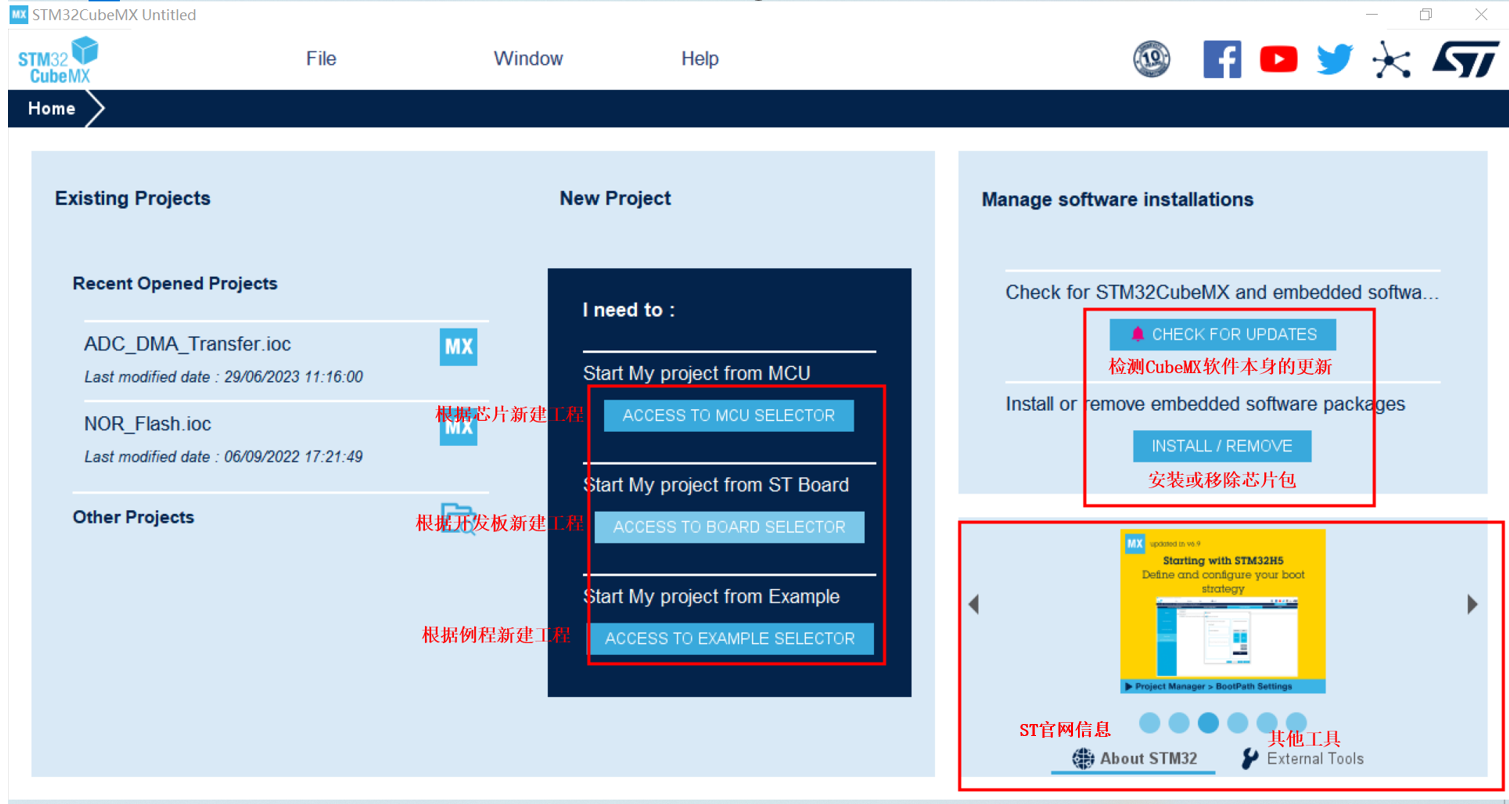
0.1 Cube启动页介绍
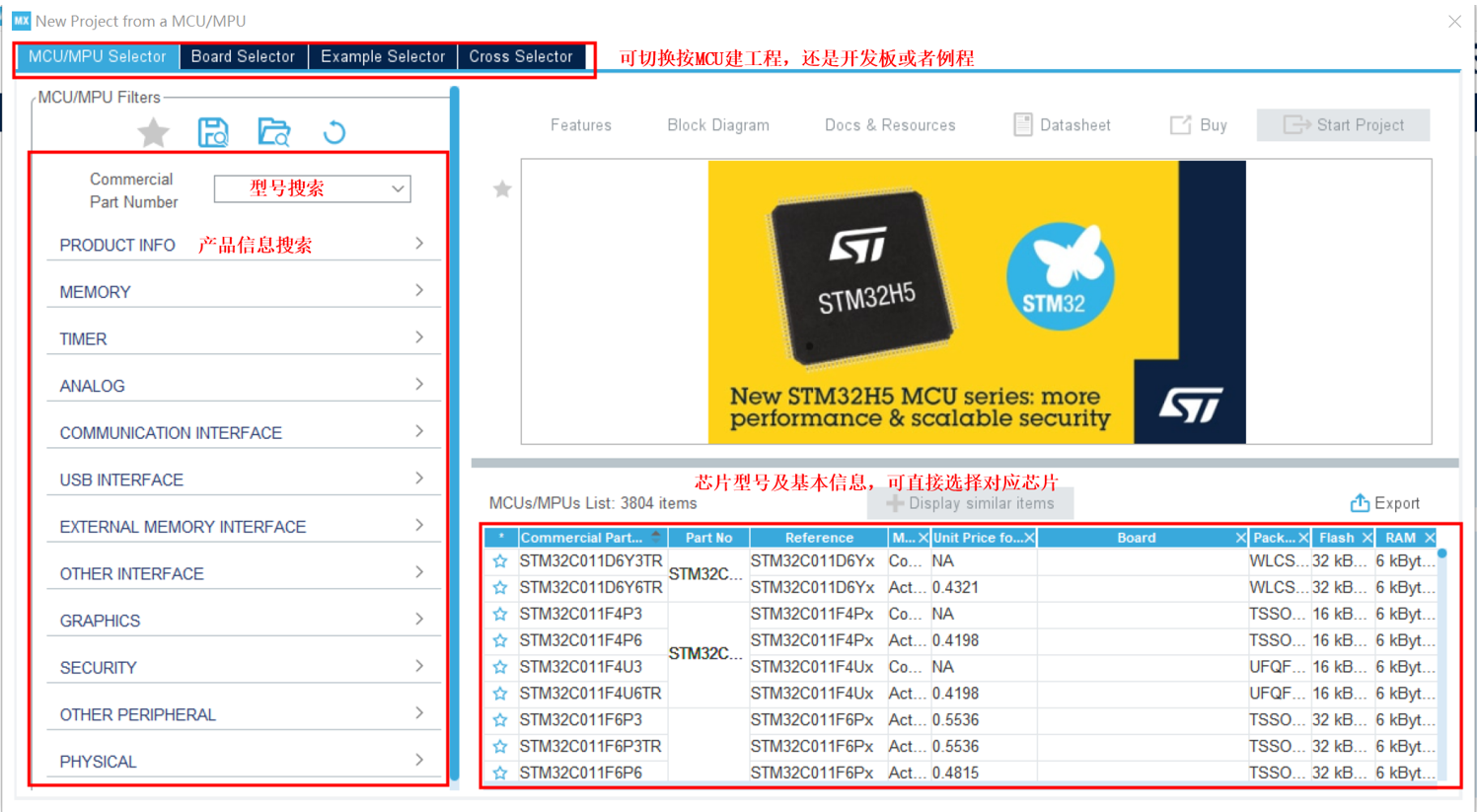
0.2 芯片选择页面介绍
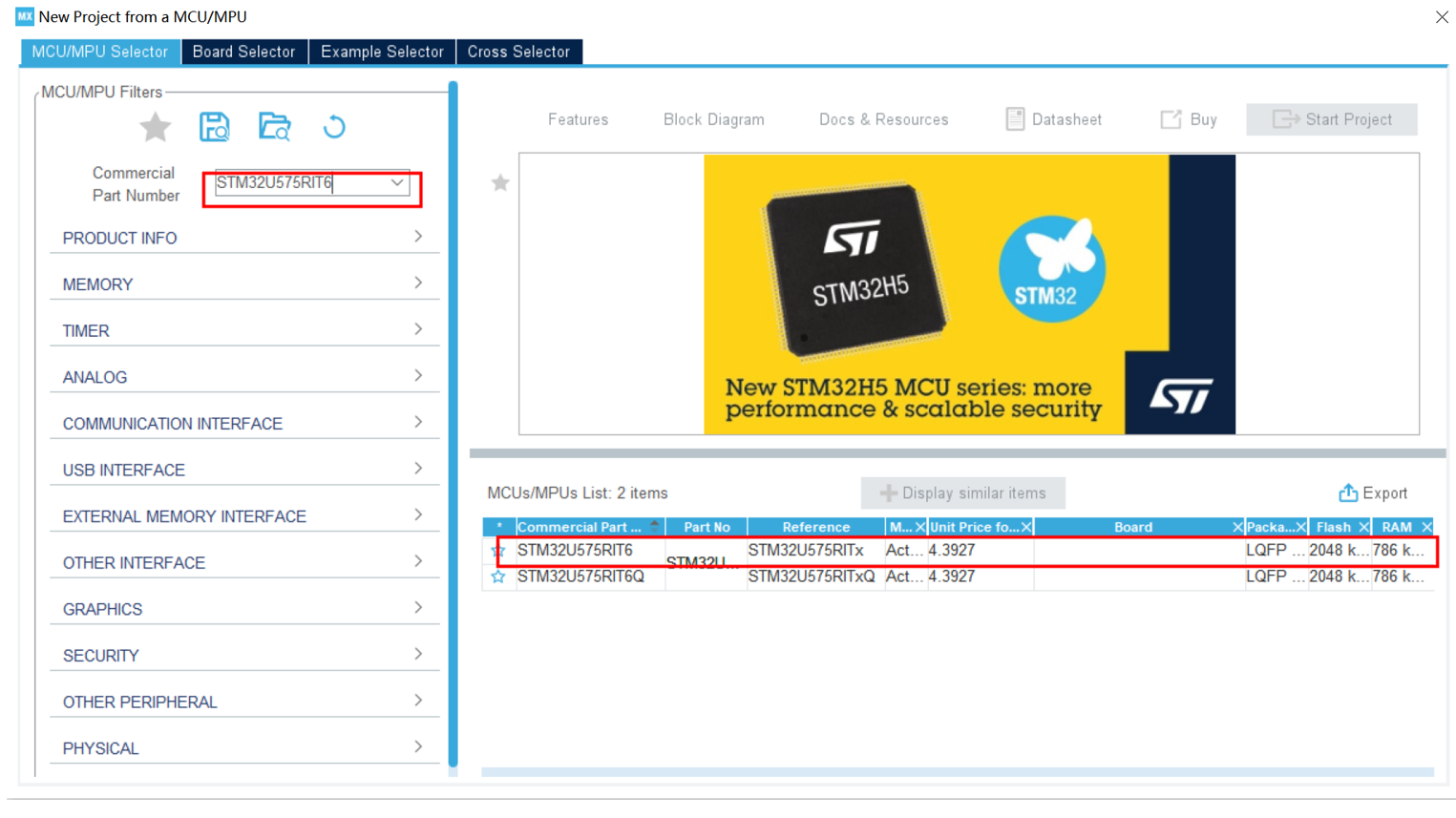
0.3 输入自己的芯片型号
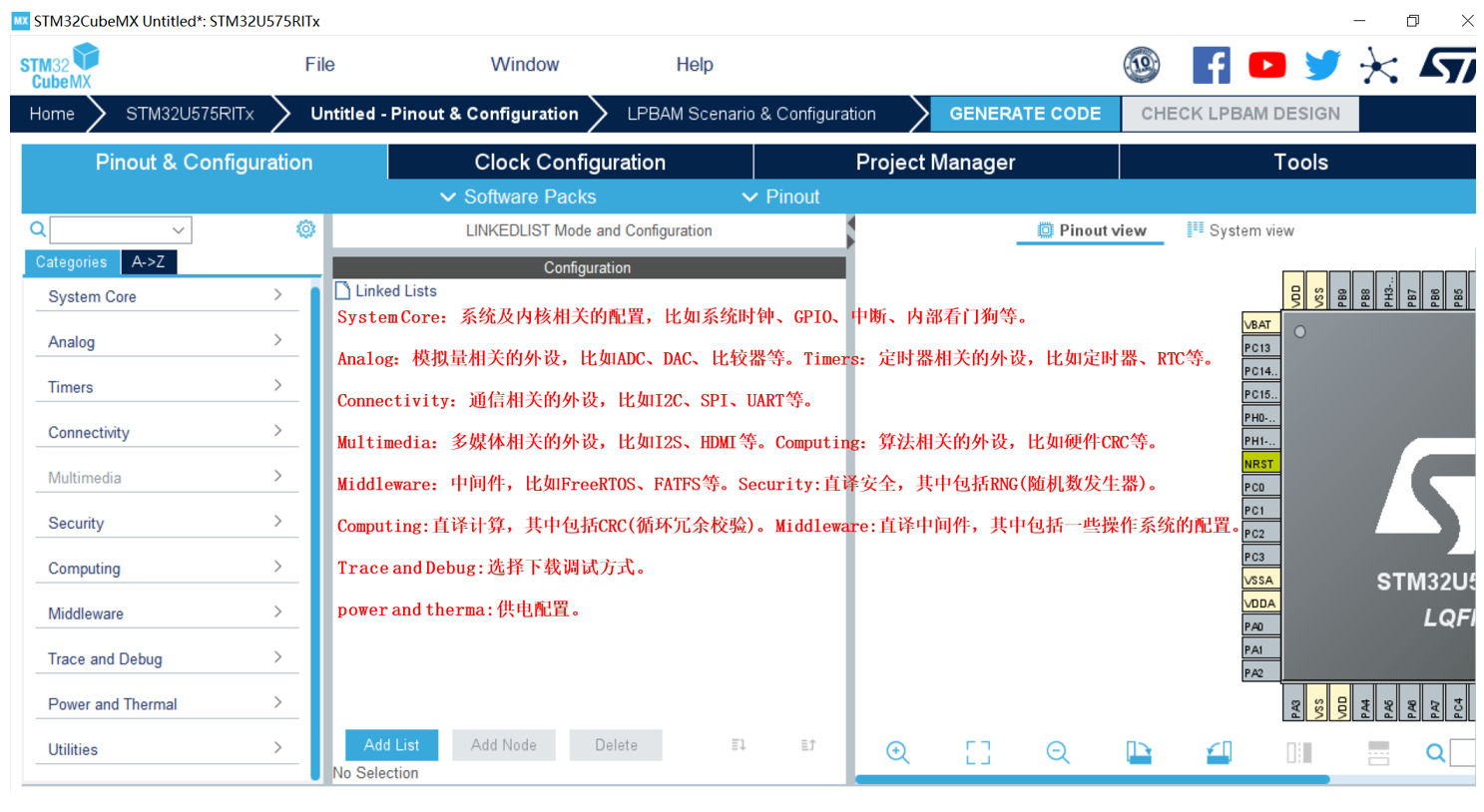
0.4 芯片配置页码介绍
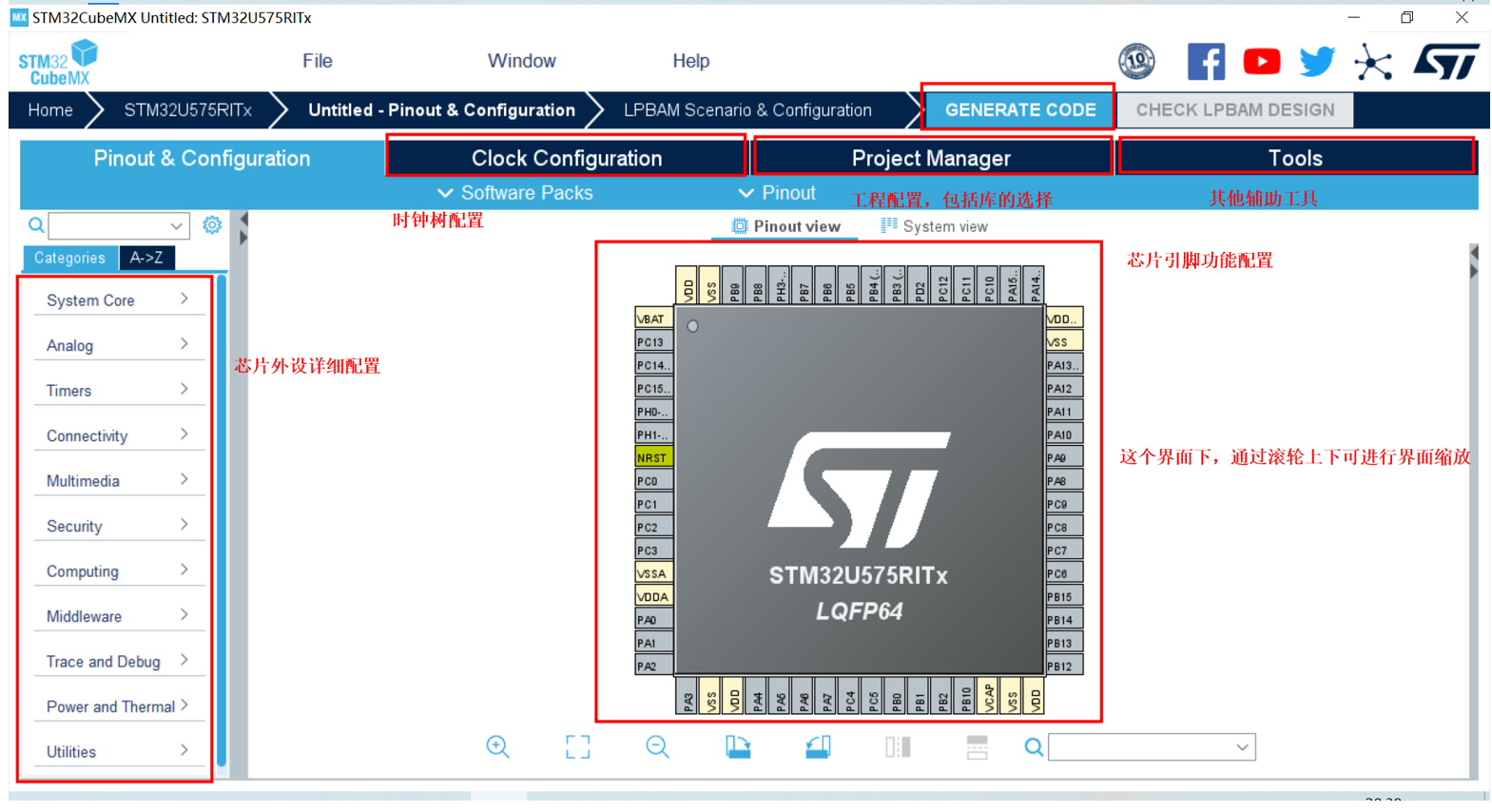
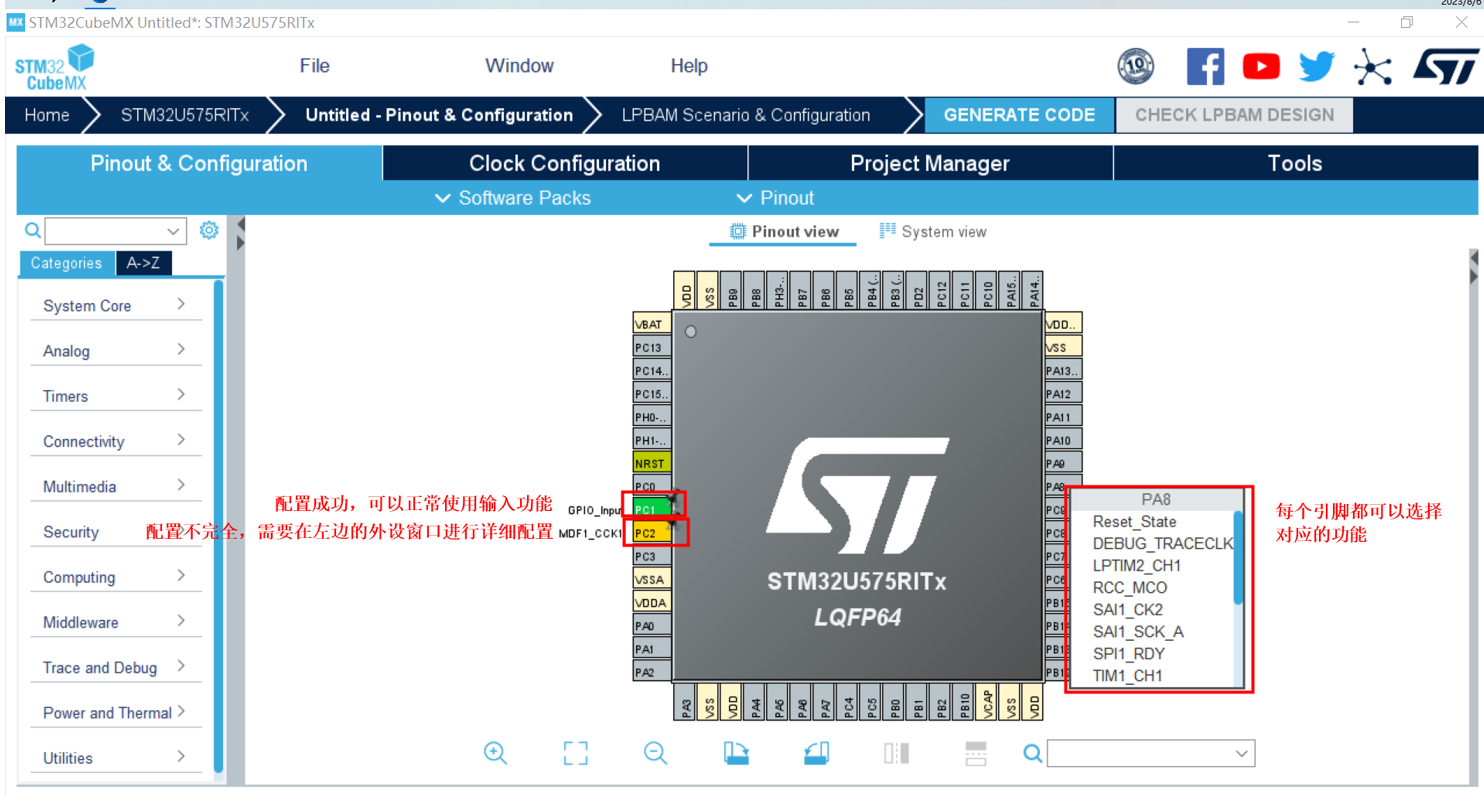
0.5 芯片外设配置栏详细说明
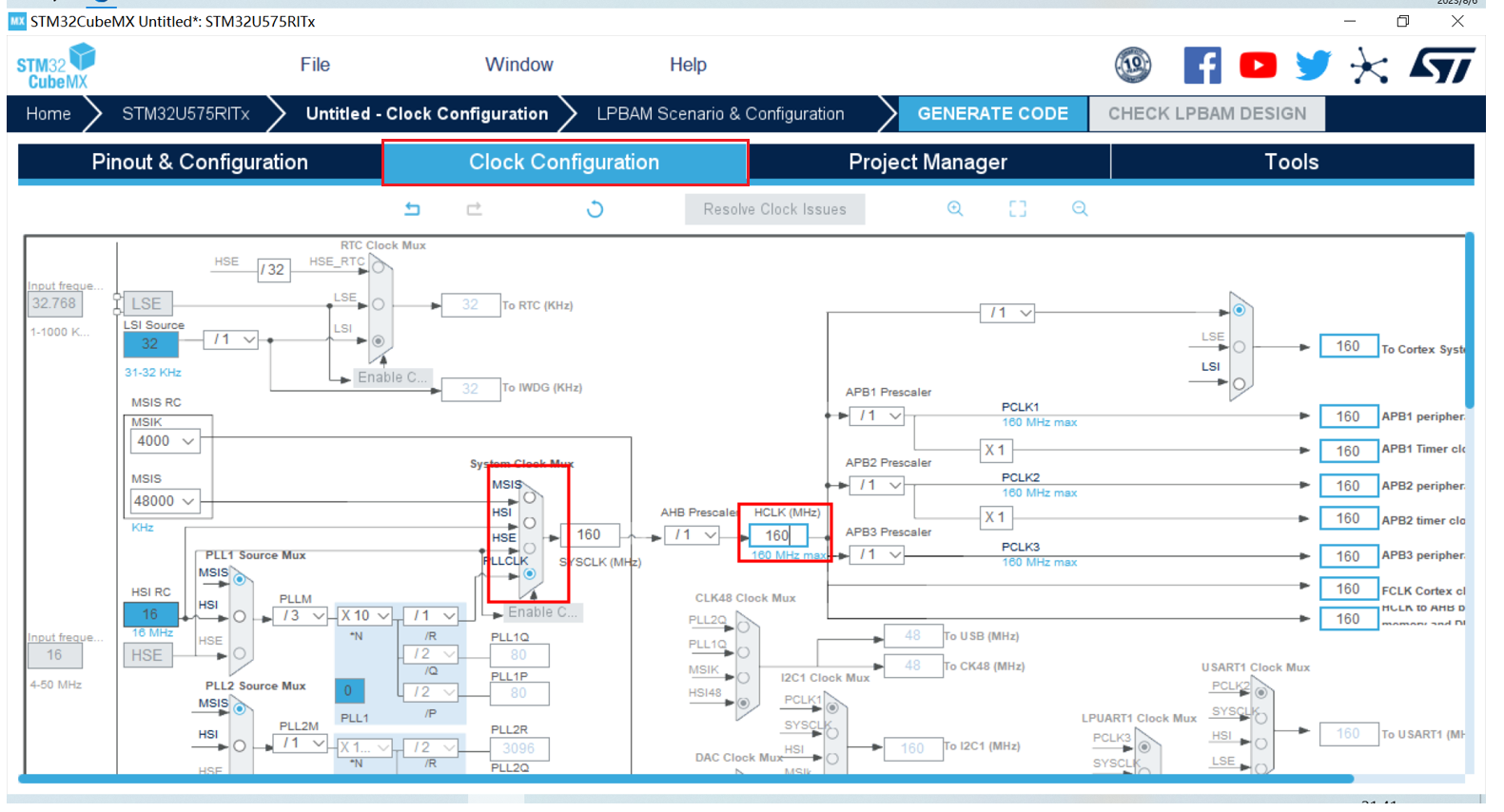
0.6 时钟树
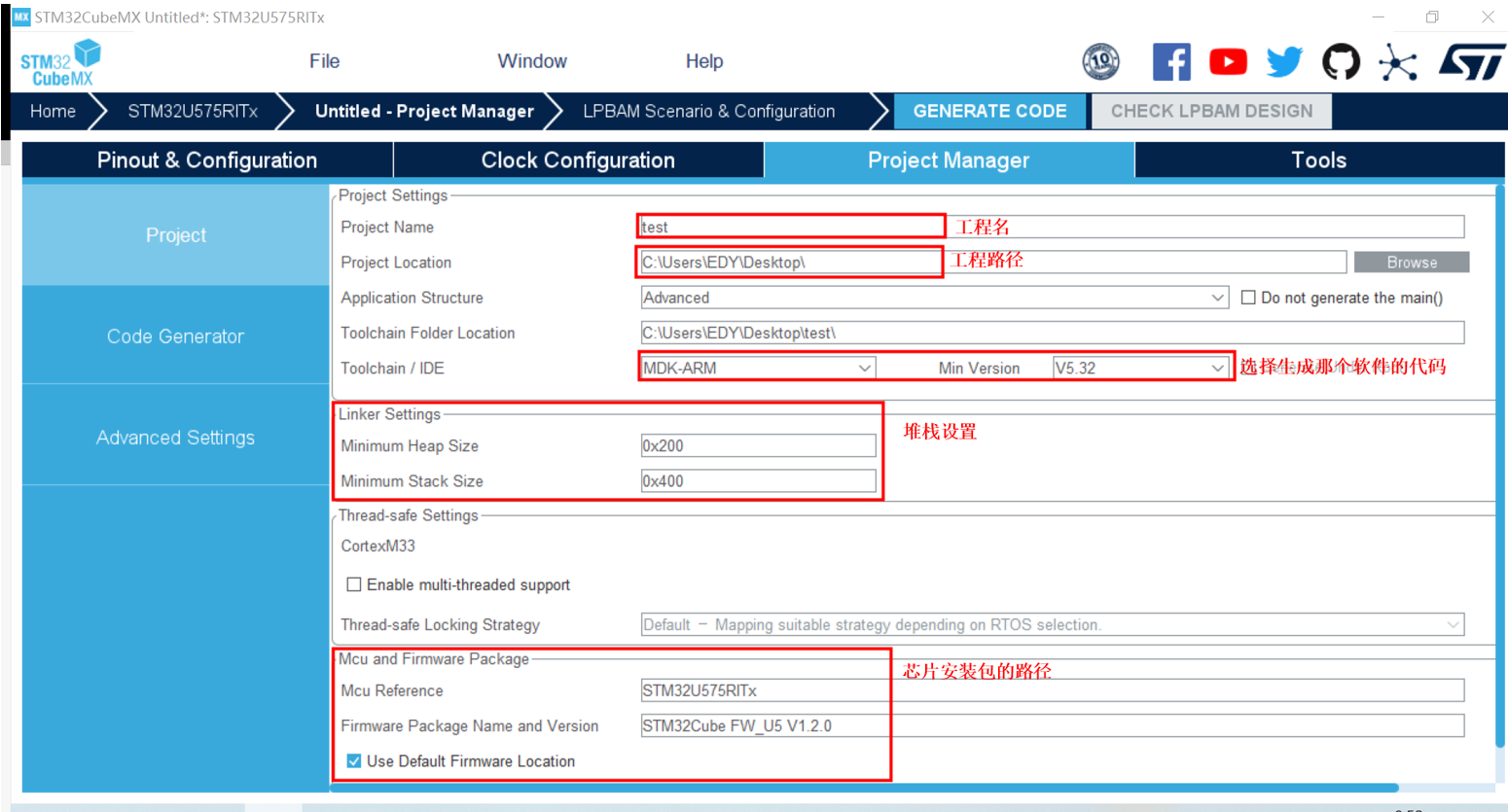
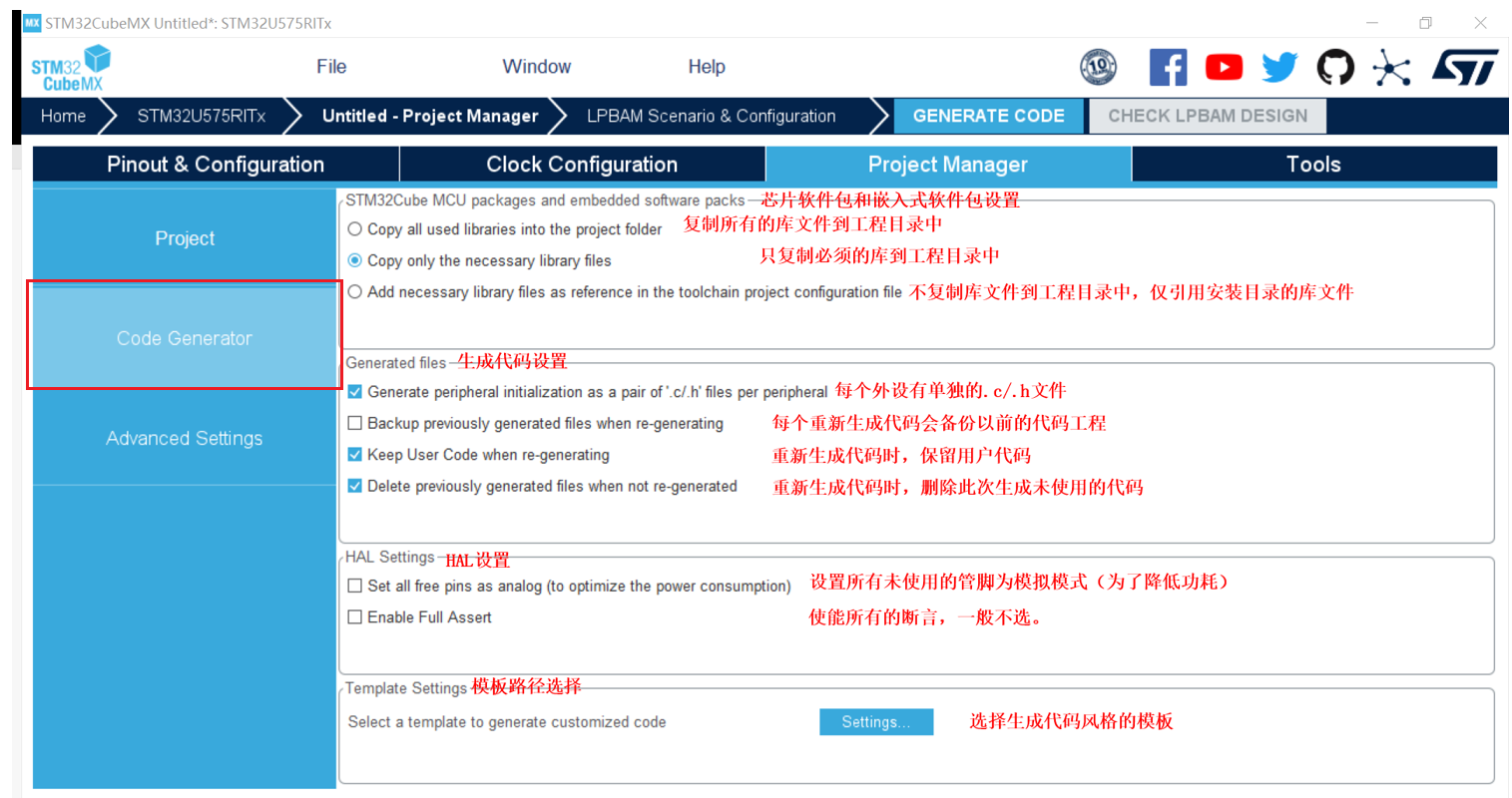
0.7 点击Priject Manager,进入工程配置页面
0.8配置前必做
将Debug改为Serial Wire
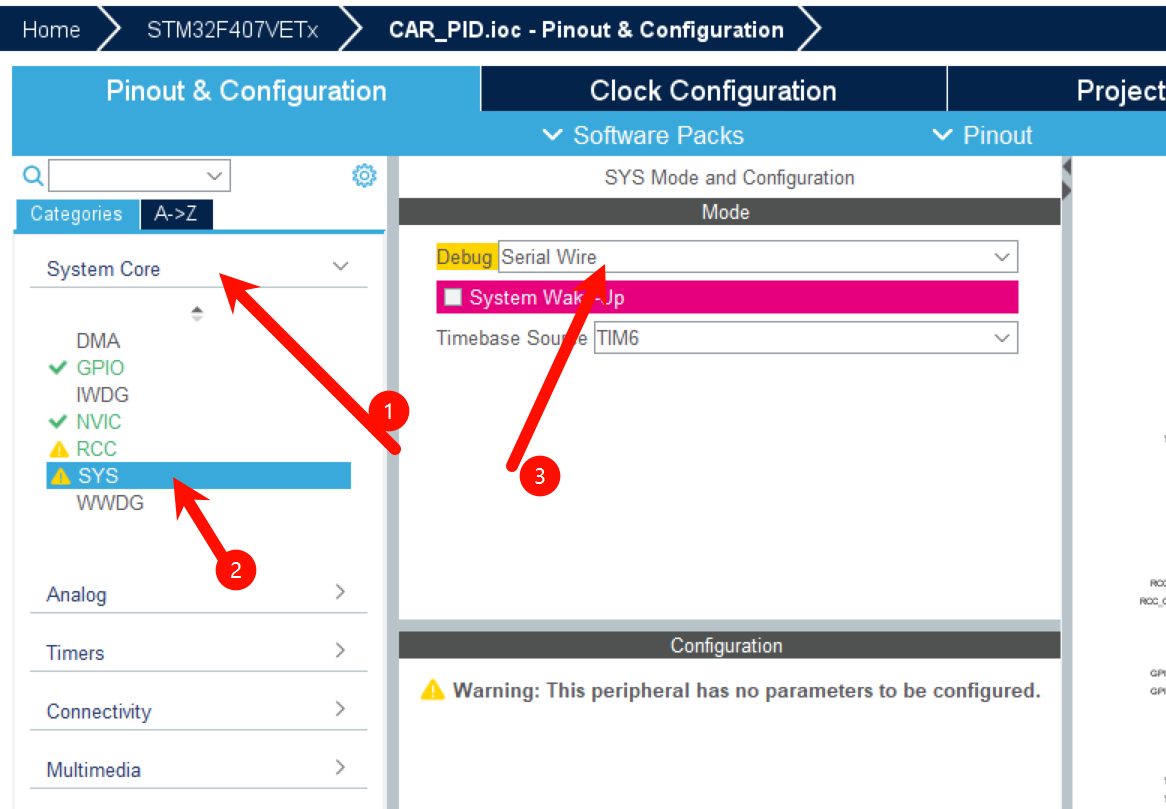
每次配置前必做,本文不再提及此操作
一、GPIO
1.1 GPIO 的 HAL 驱动程序
GPIO 引脚的操作主要包括初始化、读取引脚输入和设置引脚输出,相关的 HAL 驱动程序定义在文件 stm32f4xx_hal_gpio.h 中,主要的操作函数如表 6-1 所示,表中只列出了函数名,省略了函数参数。
| 函数名 | 功能描述 |
|---|---|
HAL_GPIO_Init() |
GPIO 引脚初始化 |
HAL_GPIO_DeInit() |
GPIO 引脚反初始化,恢复为复位后的状态 |
HAL_GPIO_WritePin() |
使引脚输出 0 或 1 |
HAL_GPIO_ReadPin() |
读取引脚的输入电平 |
HAL_GPIO_TogglePin() |
翻转引脚的输出 |
HAL_GPIO_LockPin() |
锁定引脚配置,而不是锁定引脚的输入或输出状态 |
使用 CubeMX 生成代码时,GPIO 引脚初始化的代码会自动生成,用户常用的 GPIO 操作函数是进行引脚状态读写的函数。
1. 初始化函数 HAL_GPIO_Init()
函数 HAL_GPIO_Init() 用于对一个端口的一个或多个相同功能的引脚进行初始化设置,包括输入/输出模式、上拉或下拉等。其原型定义如下:
1 | |
其中,第 1 个参数 GPIOx 是 GPIO_TypeDef 类型的结构体指针,它定义了端口的各个寄存器的偏移地址,实际调用函数 HAL_GPIO_Init() 时使用端口的基地址作为参数 GPIOx 的值,在文件 stm32f407xx.h 中定义了各个端口的基地址,如:
1 | |
第 2 个参数 GPIO_Init 是一个 GPIO_InitTypeDef 类型的结构体指针,它定义了 GPIO 引脚的属性,这个结构体的定义如下:
1 | |
这个结构体的各个成员变量的意义及取值如下。
Pin是需要配置的 GPIO 引脚,在文件stm32f4xx_hal_gpio.h中定义了 16 个引脚的宏。如果需要同时定义多个引脚的功能,就用这些宏的或运算进行组合。1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17#define GPIO_PIN_0 ((uint16_t)0x0001) /* Pin 0 selected */
#define GPIO_PIN_1 ((uint16_t)0x0002) /* Pin 1 selected */
#define GPIO_PIN_2 ((uint16_t)0x0004) /* Pin 2 selected */
#define GPIO_PIN_3 ((uint16_t)0x0008) /* Pin 3 selected */
#define GPIO_PIN_4 ((uint16_t)0x0010) /* Pin 4 selected */
#define GPIO_PIN_5 ((uint16_t)0x0020) /* Pin 5 selected */
#define GPIO_PIN_6 ((uint16_t)0x0040) /* Pin 6 selected */
#define GPIO_PIN_7 ((uint16_t)0x0080) /* Pin 7 selected */
#define GPIO_PIN_8 ((uint16_t)0x0100) /* Pin 8 selected */
#define GPIO_PIN_9 ((uint16_t)0x0200) /* Pin 9 selected */
#define GPIO_PIN_10 ((uint16_t)0x0400) /* Pin 10 selected */
#define GPIO_PIN_11 ((uint16_t)0x0800) /* Pin 11 selected */
#define GPIO_PIN_12 ((uint16_t)0x1000) /* Pin 12 selected */
#define GPIO_PIN_13 ((uint16_t)0x2000) /* Pin 13 selected */
#define GPIO_PIN_14 ((uint16_t)0x4000) /* Pin 14 selected */
#define GPIO_PIN_15 ((uint16_t)0x8000) /* Pin 15 selected */
#define GPIO_PIN_ALL ((uint16_t)0xFFFF) /* All pins selected */Mode是引脚功能模式设置,其可用常量定义如下:1
2
3
4
5
6
7
8
9
10#define GPIO_MODE_INPUT 0x00000000U //输入浮空模式
#define GPIO_MODE_OUTPUT_PP 0x00000001U //推挽输出模式
#define GPIO_MODE_OUTPUT_OD 0x00000002U //开漏输出模式
#define GPIO_MODE_AF_PP 0x00000003U //复用功能推挽模式
#define GPIO_MODE_AF_OD 0x00000004U //复用功能开漏模式
#define GPIO_MODE_ANALOG 0x00000005U //模拟信号模式
#define GPIO_MODE_IT_RISING 0x01110000U //外部中断,上跳沿触发
#define GPIO_MODE_IT_FALLING 0x01210000U //外部中断,下跳沿触发
#define GPIO_MODE_IT_RISING_FALLING 0x01310000U //上、下跳沿触发Pull定义是否使用内部上拉或下拉电阻,其可用常量定义如下:1
2
3#define GPIO_NOPULL 0x00000000U //无上拉或下拉
#define GPIO_PULLUP 0x00000001U //上拉
#define GPIO_PULLDOWN 0x00000002U //下拉Speed定义输出模式引脚的最高输出频率,其可用常量定义如下:1
2
3
4#define GPIO_SPEED_FREQ_LOW 0x00000000U //2MHz
#define GPIO_SPEED_FREQ_MEDIUM 0x00000001U //12.5-50MHz
#define GPIO_SPEED_FREQ_HIGH 0x00000002U //25-100MHz
#define GPIO_SPEED_FREQ_VERY_HIGH 0x00000003U //50-200MHzAlternate定义引脚的复用功能,在文件stm32f4xx_hal_gpio_ex.h中定义了这个参数的可用宏定义,这些复用功能的宏定义与具体的 MCU 型号有关,下面是其中的部分定义示例:1
2
3
4
5
6
7#define GPIO_AF1_TIM1 ((uint8_t)0x01) // TIM1 复用功能映射
#define GPIO_AF1_TIM2 ((uint8_t)0x01) // TIM2 复用功能映射
#define GPIO_AF5_SPI1 ((uint8_t)0x05) // SPI1 复用功能映射
#define GPIO_AF5_SPI2 ((uint8_t)0x05) // SPI2/I2S2 复用功能映射
#define GPIO_AF7_USART1 ((uint8_t)0x07) // USART1 复用功能映射
#define GPIO_AF7_USART2 ((uint8_t)0x07) // USART2 复用功能映射
#define GPIO_AF7_USART3 ((uint8_t)0x07) // USART3 复用功能映射
2. 设置引脚输出的函数 HAL_GPIO_WritePin()
使用函数 HAL_GPIO_WritePin() 向一个或多个引脚输出高电平或低电平,其原型定义如下:
1 | |
其中,参数 GPIOx 是具体的端口基地址;GPIO_Pin 是引脚号;PinState 是引脚输出电平,是枚举类型 GPIO_PinState,在 stm32f4xx_hal_gpio.h 文件中的定义如下:
1 | |
枚举常量 GPIO_PIN_RESET 表示低电平,GPIO_PIN_SET 表示高电平。例如,要使 PF9 和 PF10 输出低电平,可使用如下代码:
1 | |
若要输出高电平,只需修改为如下代码:
1 | |
3. 读取引脚输入的函数 HAL_GPIO_ReadPin()
函数 HAL_GPIO_ReadPin() 用于读取一个引脚的输入状态,其原型定义如下:
1 | |
函数的返回值是枚举类型 GPIO_PinState。常量 GPIO_PIN_RESET 表示输入为 0(低电平),常量 GPIO_PIN_SET 表示输入为 1(高电平)。
4. 翻转引脚输出的函数 HAL_GPIO_TogglePin()
函数 HAL_GPIO_TogglePin() 用于翻转引脚的输出状态。例如,引脚当前输出为高电平,执行此函数后,引脚输出为低电平。其原型定义如下,只需传递端口号和引脚号:
1 | |
1.2 GPIO输出配置
1.2.1 CubeMX配置
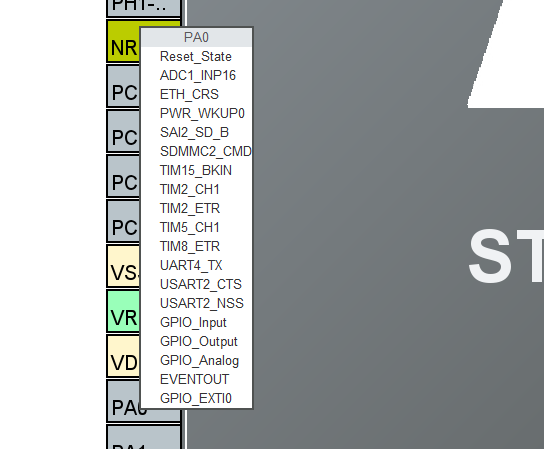
点击CUBEMX左侧你想要配置的引脚,以配置PA0为例,即可出现GPIO的配置界面,在此只介绍通用的GPIO配置,即模拟的GPIO,再简单来说只配置GPIO为输入或者输出,对应GPIO_Input和GPIO_Output。
若想要配置PA0为输出模式,则在上图界面中点击GPIO_Output即可配置引脚为输出,同时在界面上也会有相应的显示: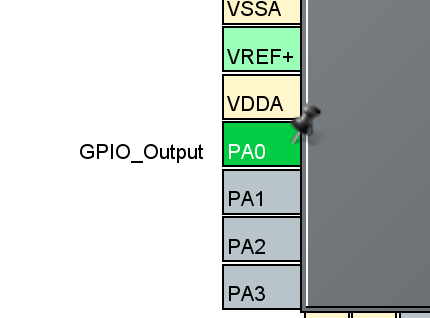
此时只是仅仅配置了GPIO口为输出模式,STM32CUBEMX还提供许多其他参数以供配置。点击System Core下的GPIO选项,从右侧窗口找到PA0这个IO口并点击一下。
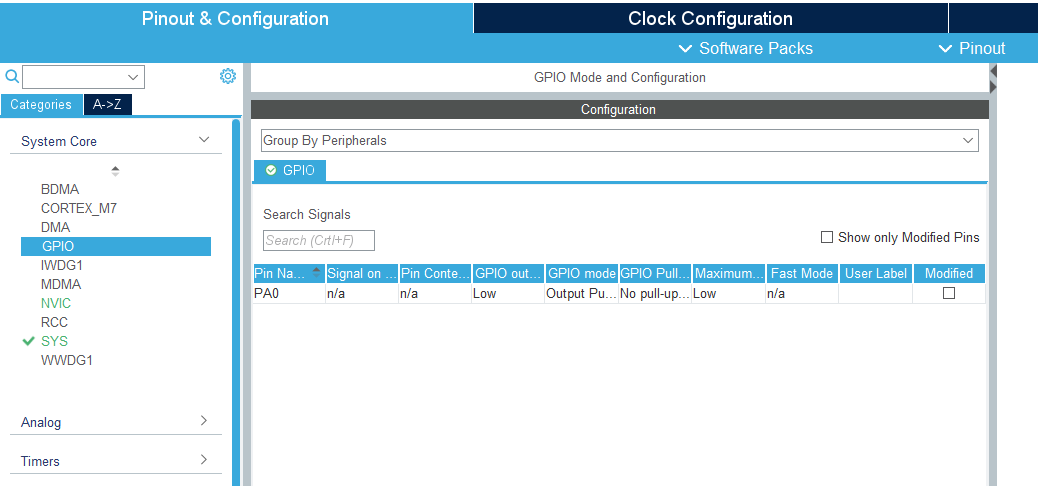
点击之后窗口界面会显示PA0的详细配置参数(输出),如下图所示:
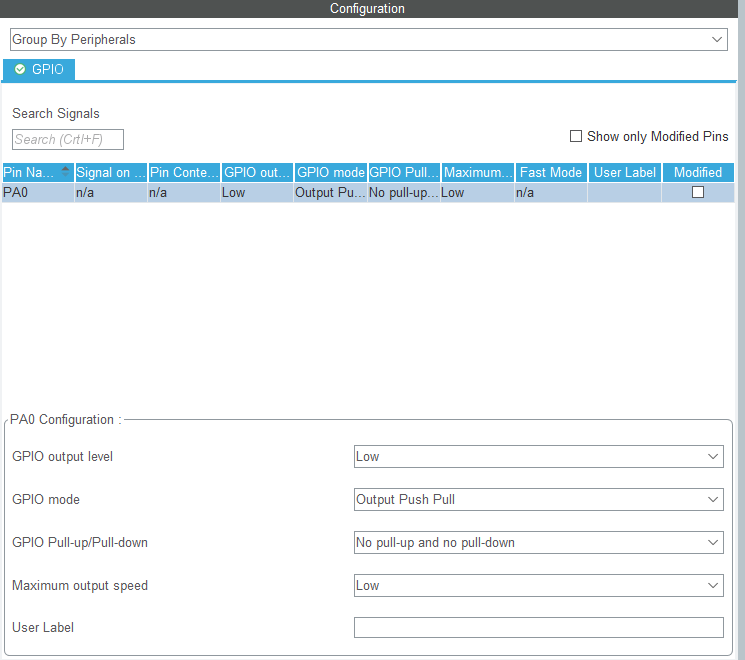
GPIO output leve
表示上电的默认电平,可配置高或者低
GPIO mode
表示输出模式,可配置为Output Push Pull(推挽输出)或Output Open Drain(开漏输出)
GPIO Pull-up/Pull-down
表示是否上下拉,可配置为上拉或者下拉
Maximum output speed
表示输出速度,对于高速接口需要配置为Very High
User Label
可修改IO口名称,比如可写入LED,把IO口名称变为LED
对于驱动LED,一般配置IO口为推挽输出,上下拉非必要,IO速度低速即可。
1.2.2 GPIO输出函数
**1. HAL_GPIO_WritePin()**最常用的 GPIO 输出控制函数,直接设置指定引脚的输出电平。
函数原型:
1 | |
参数说明:
GPIOx:GPIO 端口(如
GPIOA、GPIOB等)。GPIO_Pin:引脚编号(如
GPIO_PIN_0、GPIO_PIN_5,可通过|组合多个引脚,如GPIO_PIN_0 | GPIO_PIN_1)。PinState
:输出状态,可选值:
- GPIO_PIN_SET:输出高电平。
- GPIO_PIN_RESET:输出低电平。
示例:
1 | |
**2. HAL_GPIO_TogglePin()**用于翻转指定引脚的输出电平(高→低或低→高)。
函数原型:
1 | |
参数说明:
- GPIOx:GPIO 端口。
- GPIO_Pin:引脚编号(支持单个或多个引脚)。
示例:
1 | |
在 STM32 中设置了 User Label(用户标签,即通过 CubeMX 给引脚自定义的别名,如将 PA0 命名为 “LED”)后,GPIO 输出函数的用法本质不变,只是可以用自定义的标签替代原始的引脚宏定义,提高代码可读性。
例如:若将 PA0 的 User Label 设为 “LED”,则原本的
HAL_GPIO_WritePin(GPIOA, GPIO_PIN_0, GPIO_PIN_SET);可改写为HAL_GPIO_WritePin(LED_GPIO_Port, LED_Pin, GPIO_PIN_SET);其中,
LED_GPIO_Port和LED_Pin是 CubeMX 根据 User Label 自动生成的宏定义(在main.h或gpio.h中),分别对应引脚的端口(如 GPIOA)和引脚编号(如 GPIO_PIN_0)。
1.3 GPIO输入配置
1.3.1 Cube MX配置
上述介绍了输出的一些功能配置以及调用的函数,下面介绍输入的配置即调用的函数。
以配置PA1为输入为例,现在右侧ui界面选中PA1并配置为输入模式: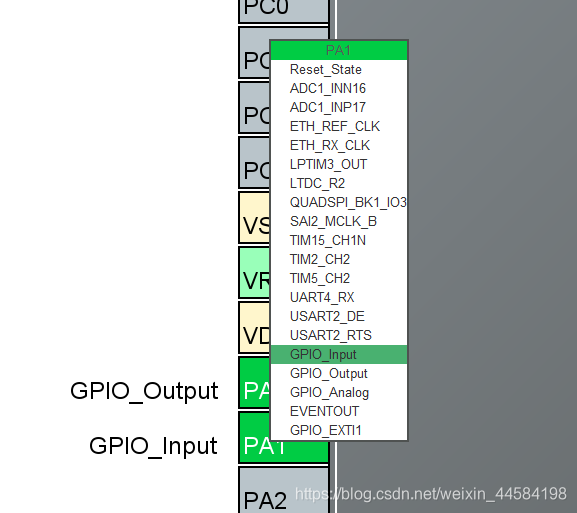
点击System Core下的GPIO选项,从右侧窗口找到PA1这个IO口并点击一下,此时会出现关于这个IO口的更多的配置。但是当配置为输入时,可配置的参数相对于输出时少了不少,唯一的配置选项为配置上下拉,注意,最后一行User Label只是对GPIO命名,不少对IO进行寄存器配置。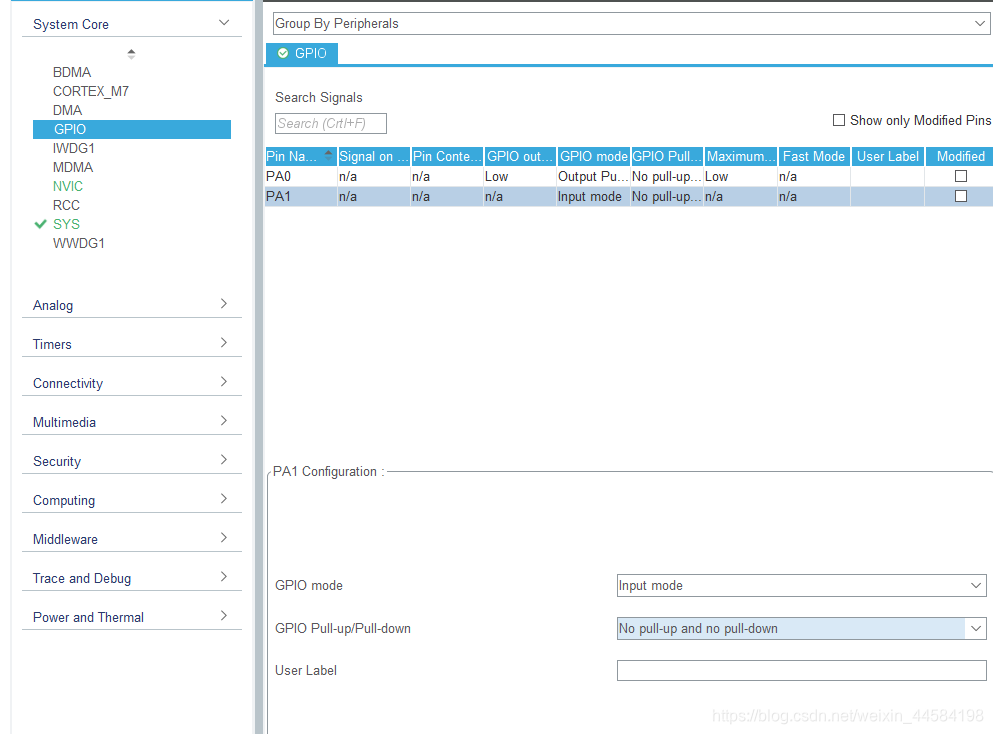
1.3.2 GPIO输入函数
HAL_GPIO_ReadPin(GPIO_TypeDef GPIOx, uint16_t GPIO_Pin)*
功能:读取指定 GPIO 引脚的输入电平状态(高电平或低电平)。
参数说明:
- GPIOx:GPIO 端口(如
GPIOA、GPIOB等)。 - GPIO_Pin:引脚编号(如
GPIO_PIN_0、GPIO_PIN_5)。
返回值:GPIO_PinState类型,可能的返回值为:
- GPIO_PIN_SET:表示引脚输入为高电平。
- GPIO_PIN_RESET:表示引脚输入为低电平。
【案例】按键点灯实验
1.4.1 CubeMX 操作步骤
①打开 STM32CubeMX,新建工程并选择目标芯片(如 STM32F103C8T6),进入配置界面。
②配置按键引脚:假设按键连接在 PA0 引脚(外部下拉,按下时接高电平),在引脚分布图中点击 PA0,选择 “GPIO_Input”;进入 PA0 的详细配置,将 “GPIO Pull-up/Pull-down” 设为 “Pull-down”(下拉模式,未按下时为低电平),其他保持默认。
③配置 LED 引脚:假设 LED 连接在 PA5 引脚(低电平点亮),点击 PA5 选择 “GPIO_Output”;进入 PA5 配置,“GPIO mode” 设为 “Push-Pull”,“GPIO Pull-up/Pull-down” 设为 “Pull-up”,“Maximum output speed” 设为 “Low”。
④配置时钟:点击 “Clock Configuration”,根据芯片型号设置系统时钟(如 STM32F103C8T6 可设为 72MHz),确保时钟树无红色报错。
⑤设置工程:点击 “Project Manager”,填写工程名和路径,选择 IDE(如 MDK-ARM V5);在 “Code Generator” 中勾选 “Generate peripheral initialization as a pair of .c/.h files per peripheral”,生成代码并打开工程。
1.4.2 代码实现步骤
①在 “main ()” 函数的初始化部分(“/* USER CODE BEGIN 2 */” 下方),添加 LED 初始状态设置代码:
1 | |
②在 “while (1)” 循环中(“/* USER CODE BEGIN 3 */” 下方),添加按键读取与 LED 控制代码:
1 | |
③编译工程(F7)并下载到开发板(F8),按下 PA0 引脚连接的按键时,PA5 引脚连接的 LED 状态会翻转(亮→灭或灭→亮),实现按键控制 LED 的功能。
二、中断
2.1 认识NVIC界面
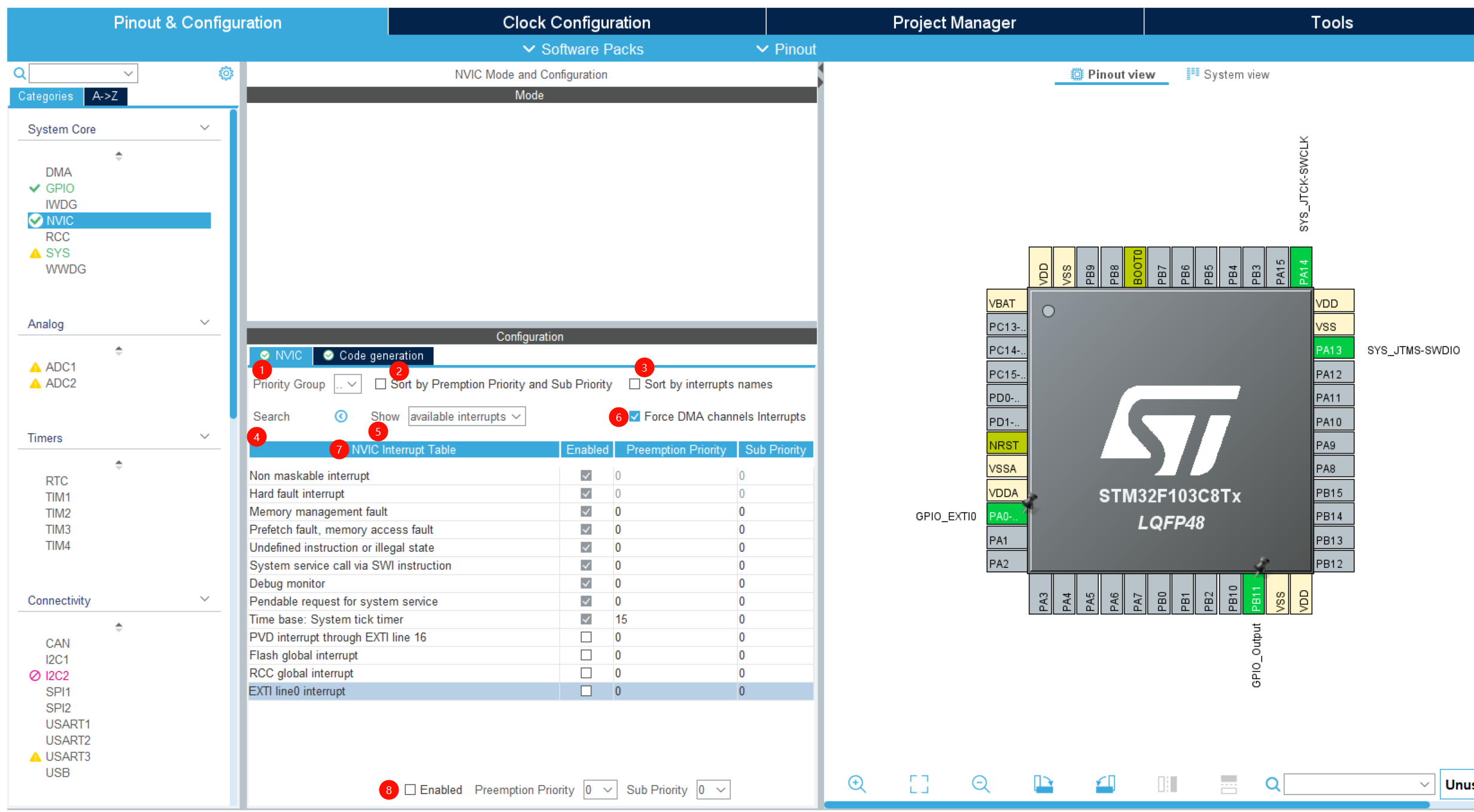
① Priority Group:用于划分抢占优先级和子优先级的位数分配,不同分组决定了系统中可配置的抢占优先级和子优先级的数量,对中断嵌套以及同抢占优先级中断的响应顺序起着关键作用。
② Sort by Preemption Priority and Sub Priority:能按抢占优先级和子优先级对中断进行排序,勾选后中断会按抢占优先级从低到高、同抢占优先级下子优先级从低到高的顺序排列,方便查看和管理不同优先级的中断。
③ Sort by interrupts names:可按中断名称对中断进行排序,勾选后中断按名称的字母顺序排列,便于通过名称快速定位特定中断。
④ Search:用于在众多中断里快速查找特定中断,输入关键词能过滤出匹配的中断项,提升配置效率。
⑤ Show:下拉菜单里的available interrupts表示显示所有可用的中断,通过该选项可控制列表中显示的中断范围,方便聚焦于需要配置的中断集合。
⑥ Force DMA channels Interrupts:勾选后强制使能 DMA 通道相关的中断,确保 DMA 操作过程中的中断(如传输完成、传输错误等)能被 NVIC 捕获和处理。
⑦ NVIC Interrupt Table:是页面核心区域,列出各类中断及配置项:
- 中断名称列:涵盖不可屏蔽中断、硬 fault 中断、内存管理 fault 中断、系统滴答定时器中断、外部中断线 0 中断等各类中断源。
- Enabled:勾选表示使能对应中断,允许中断发生时向 CPU 发请求;未勾选则禁用。
- Preemption Priority:抢占优先级,数值越小优先级越高,高优先级可打断低优先级中断执行。
- Sub Priority:子优先级,抢占优先级相同时,子优先级高(数值小)的中断先被响应。
⑧ 页面底部配置项:
- Enabled:单独设置选中中断是否使能。
- Preemption Priority:设置选中中断的抢占优先级。
- Sub Priority:设置选中中断的子优先级。
2.2 中断设置相关 HAL 驱动程序
中断管理相关驱动程序的头文件是 stm32f4xx_hal_cortex.h,其常用函数如表 7-3 所示。
| 函数名 | 功能描述 |
|---|---|
HAL_NVIC_SetPriorityGrouping() |
设置 4 位二进制数的优先级分组策略 |
HAL_NVIC_SetPriority() |
设置某个中断的抢占优先级和次优先级 |
HAL_NVIC_EnableIRQ() |
启用某个中断 |
HAL_NVIC_DisableIRQ() |
禁用某个中断 |
HAL_NVIC_GetPriorityGrouping() |
返回当前的优先级分组策略 |
HAL_NVIC_GetPriority() |
返回某个中断的抢占优先级、次优先级数值 |
HAL_NVIC_GetPendingIRQ() |
检查某个中断是否被挂起 |
HAL_NVIC_SetPendingIRQ() |
设置某个中断的挂起标志,表示发生了中断 |
HAL_NVIC_ClearPendingIRQ() |
清除某个中断的挂起标志 |
表 7-3 中前面的 3 个函数用于 CubeMX 自动生成的代码,其他函数用于用户代码。几个常用的函数详细介绍如下,其他一些函数的详细定义和功能可查看源程序里的注释。
1. 函数 HAL_NVIC_SetPriorityGrouping()
函数 HAL_NVIC_SetPriorityGrouping() 用于设置优先级分组策略,其函数原型定义如下:
1 | |
其中,参数 PriorityGroup 是优先级分组策略,可使用文件 stm32f4xx_hal_cortex.h 中定义的几个宏定义常量,如下所示,它们表示不同的分组策略。
1 | |
2. 函数 HAL_NVIC_SetPriority()
函数 HAL_NVIC_SetPriority() 用于设置某个中断的抢占优先级和次优先级,其函数原型定义如下:
1 | |
其中,参数 IRQn 是中断的中断号,为枚举类型 IRQn_Type。枚举类型 IRQn_Type 的定义在文件 stm32f407xx.h 中,它定义了表 7-1 和表 7-2 中所有中断的中断号枚举值。在中断操作的相关函数中,都用 IRQn_Type 类型的中断号表示中断,这个枚举类型的部分定义如下:
1 | |
由这个枚举类型的定义代码可以看到,对于表 7-2 中的可屏蔽中断,其中断号枚举值就是在中断名称后面加了 “_IRQn”。例如,中断号为 0 的窗口看门狗中断 WWDG,其中断号枚举值就是 WWDG_IRQn。
函数中的另外两个参数,PreemptPriority 是抢占优先级数值,SubPriority 是次优先级数值。这两个优先级的数值范围需要在设置的优先级分组策略的可设置范围之内。例如,假设使用了分组策略 2,对于中断号为 6 的外部中断 EXTI0,设置其抢占优先级为 1,次优先级为 0,则执行的代码如下:
1 | |
3. 函数 HAL_NVIC_EnableIRQ()
函数 HAL_NVIC_EnableIRQ() 的功能是在 NVIC 控制器中开启某个中断,只有在 NVIC 中开启某个中断后,NVIC 才会对这个中断请求做出响应,执行相应的 ISR。其原型定义如下:
1 | |
其中,枚举类型 IRQn_Type 的参数 IRQn 是中断号的枚举值。
2.3 外部中断相关 HAL 函数
外部中断相关函数定义在文件 stm32f4xx_hal_gpio.h 中,函数列表如表 7-4 所示。
| 函数名 | 功能描述 |
|---|---|
__HAL_GPIO_EXTI_GET_IT() |
检查某个外部中断线是否有挂起(Pending)的中断 |
__HAL_GPIO_EXTI_CLEAR_IT() |
清除某个外部中断线的挂起标志位 |
__HAL_GPIO_EXTI_GET_FLAG() |
与 __HAL_GPIO_EXTI_GET_IT() 的代码和功能完全相同 |
__HAL_GPIO_EXTI_CLEAR_FLAG() |
与 __HAL_GPIO_EXTI_CLEAR_IT() 的代码和功能完全相同 |
__HAL_GPIO_EXTI_GENERATE_SWIT() |
在某个外部中断线上产生软中断 |
HAL_GPIO_EXTI_IRQHandler() |
外部中断 ISR 中调用的通用处理函数 |
HAL_GPIO_EXTI_Callback() |
外部中断处理的回调函数,需要用户重新实现 |
1. 读取和清除中断标志
在 HAL 库中,以 “__HAL” 为前缀的都是宏函数,表 7-4 中前几个函数都是宏函数。
函数
__HAL_GPIO_EXTI_GET_IT()定义如下:1
#define __HAL_GPIO_EXTI_GET_FLAG(__EXTI_LINE__) (EXTI->PR & (__EXTI_LINE__))其功能是检查外部中断挂起寄存器(EXTI_PR)中某个中断线的挂起标志位是否置位。参数
__EXTI_LINE__是某个外部中断线,用GPIO_PIN_0、GPIO_PIN_1等宏定义常量表示。函数的返回值只要不等于 0(用宏RESET表示 0),就表示外部中断线挂起标志位被置位,有未处理的中断事件。函数
__HAL_GPIO_EXTI_CLEAR_IT()用于清除某个中断线的中断挂起标志位,其定义如下:1
#define __HAL_GPIO_EXTI_CLEAR_IT(__EXTI_LINE__) (EXTI->PR = (__EXTI_LINE__))向外部中断挂起寄存器(EXTI_PR)的某个中断线位写入 1,就可以清除该中断线的挂起标志。在外部中断的 ISR 里处理完中断后,需要调用这个函数清除挂起标志位,以便再次响应下一次中断。
2. 在某个外部中断线上产生软中断
函数 __HAL_GPIO_EXTI_GENERATE_SWIT() 的功能是在某个中断线上产生软中断,其定义如下:
1 | |
它实际上是将外部中断的软件中断事件寄存器(EXTI_SWIER)中对应于中断线 __EXTI_LINE__ 的位置 1,通过软件的方式产生某个外部中断。
3. 外部中断 ISR 以及中断处理回调函数
对于 0 到 15 线的外部中断,从表 7-2 可以看到:EXTI0 至 EXTI4 有独立的 ISR,EXTI[9:5] 共用一个 ISR,EXTI[15:10] 共用一个 ISR。在启用某个中断后,CubeMX 自动生成的中断处理程序文件 stm32f4xx_it.c 中会生成 ISR 的代码框架。以下是几个外部中断的 ISR 代码框架:
1 | |
可以看到,这些 ISR 都调用了函数 HAL_GPIO_EXTI_IRQHandler(),并以中断线作为函数参数。函数 HAL_GPIO_EXTI_IRQHandler() 是外部中断处理通用函数,其代码如下:
1 | |
这个函数的逻辑是:如果检测到中断线 GPIO_Pin 的中断挂起标志不为 0,就清除中断挂起标志位,然后执行函数 HAL_GPIO_EXTI_Callback()。HAL_GPIO_EXTI_Callback() 是对中断进行响应处理的回调函数,其代码框架在文件 stm32f4xx_hal_gpio.c 中,代码如下:
1 | |
这个函数前有修饰符 __weak,用于定义弱函数。弱函数是 HAL 库中预先定义的带有 __weak 修饰符的函数,若用户未重新实现这些函数,编译时就编译这些弱函数;若用户在程序文件里重新实现了这些函数,就编译用户重新实现的函数。用户重新实现一个弱函数时,要舍弃修饰符 __weak。
弱函数一般用作中断处理的回调函数,例如这里的 HAL_GPIO_EXTI_Callback()。如果用户重新实现了这个函数,对某个外部中断做出具体的处理,用户代码就会被编译进去。
在 STM32Cube 编程方式中,用户只需搞清楚与中断事件对应的回调函数,然后重新实现回调函数即可。对于外部中断,只有一个中断事件源,所以只有一个回调函数 HAL_GPIO_EXTI_Callback()。在对外部中断进行处理时,只需重新实现这个函数即可,在本章的示例里会具体讲到。
2.4 中断外设相关HAL函数
UART
常用函数
1 | |
介绍
当调用 HAL_UART_Receive_IT 或 HAL_UART_Receive_DMA 后,接收到指定长度数据时触发。常用于接收单字节命令或协议帧。需在回调中重新调用 HAL_UART_Receive_IT 以持续监听。
示例:
1 | |
1 | |
介绍
配合 HAL_UART_Receive_DMA 使用,当串口总线空闲(IDLE)时触发,Size 为实际接收到的字节数。适用于接收不定长数据包(如一帧传感器数据)。
示例:
1 | |
其他函数
1 | |
SPI
常用函数
1 | |
介绍
分别在SPI发送、接收或全双工传输完成后调用。适用于与SPI外设(如Flash、显示屏)通信。
示例(发送完成处理):
1 | |
其他函数
1 | |
I2C
常用函数
1 | |
介绍
I2C主模式发送或接收完成回调。常用于读写EEPROM、传感器等。
示例(写后读):
1 | |
其他函数
1 | |
ADC
常用函数
1 | |
介绍
ADC转换完成后调用。可用于单次转换或连续转换模式下获取结果。
示例:
1 | |
其他函数
1 | |
TIM
常用函数
1 | |
介绍
定时器更新中断(溢出)时调用。常用于周期性任务,如LED闪烁、定时采样。
示例:
1 | |
其他函数
1 | |
DMA
常用函数
1 | |
介绍
DMA传输完成时调用。常用于UART、SPI、ADC等外设的数据搬运完成通知。
示例:
1 | |
其他函数
1 | |
EXTI
常用函数
1 | |
介绍
外部中断触发时调用。用于响应按键、信号边沿等事件。
示例:
1 | |
其他函数
无
CAN
常用函数
1 | |
介绍
CAN发送完成或接收FIFO有消息时调用。
示例:
1 | |
其他函数
1 | |
USB
常用函数
1 | |
介绍
USB数据IN/OUT阶段完成或SETUP包到达时调用。用于处理控制传输和数据传输。
其他函数
1 | |
【案例】中断按键点灯
2.5.1工程配置
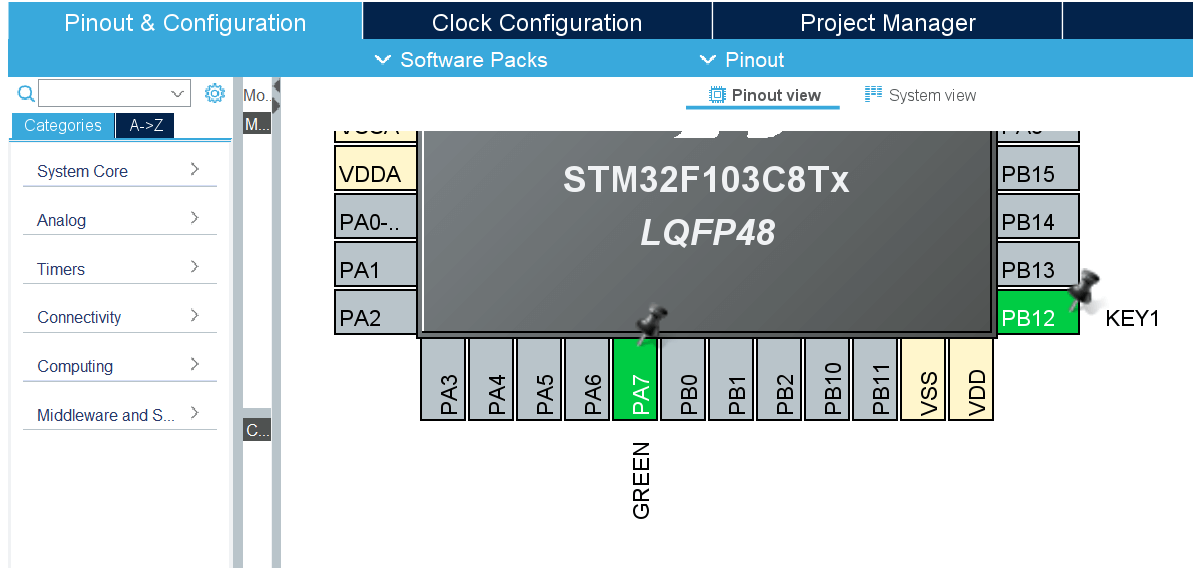
分配引脚:在Pinout&Configuration页面,配置如下引脚
中断引脚:将 PB12 设置为 GPIO_EXTI12,并设置 User label 为 KEY1
输出引脚:将 PA7 设置为 GPIO_Output,并分别设置 User label 为 GREEN
左键点击对应的引脚,选择 GPIO_Output 或 GPIO_EXTI12;
右键点击对应的引脚,选择 User label,分别输入 GREEN、KEY1
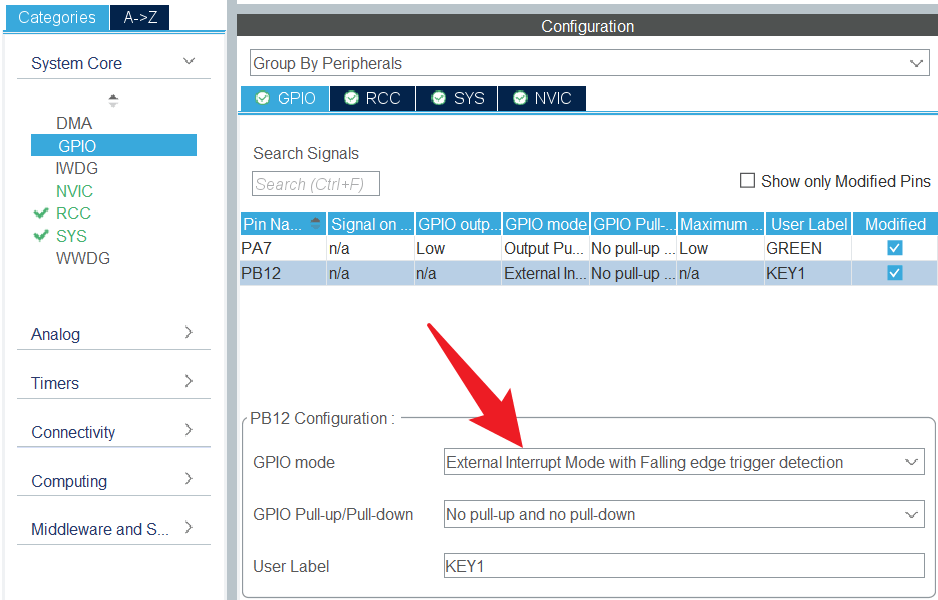
配置GPIO:在Pinout&Configuration -> GPIO
- 将 PB12 的 GPIO mode 配置为 External Interrupt Mode with Falling edge trigger detection,开启下降沿检测
- 切换到NVIC选项卡,使能 EXTI line[15:10] Interrupts
注意:如果要在回调函数中使用HAL_Delay(),就必须配置中断优先级
- System Core -> NVIC,将 Time base: System tick timer 的主要优先级调到比EXTI line高
- 否则 HAL_Delay() 函数无法在中断回调函数中执行,会导致程序卡在回调函数中
2.5.2 代码
- 在 stm32f1xx_it.c 中添加中断回调函数 void HAL_GPIO_EXTI_Callback(uint16_t GPIO_Pin),当中断被触发时,该回调函数就会执行
- 在中断回调函数中实现绿灯的亮灭翻转
1 | |