[TOC]
一、BKP备份&RTC实时时钟
RTC是一个独立的定时器。BKP并不能完全掉电不丢失,其可以完成一些主电源掉电时,保存少量数据的任务。而RTC在主电源掉电的时候保证掉电不丢失的关键就是BKP,因此二者关联程度比较高,教程放在一起讲。
1.1 Unix时间戳
1.1.1 简介
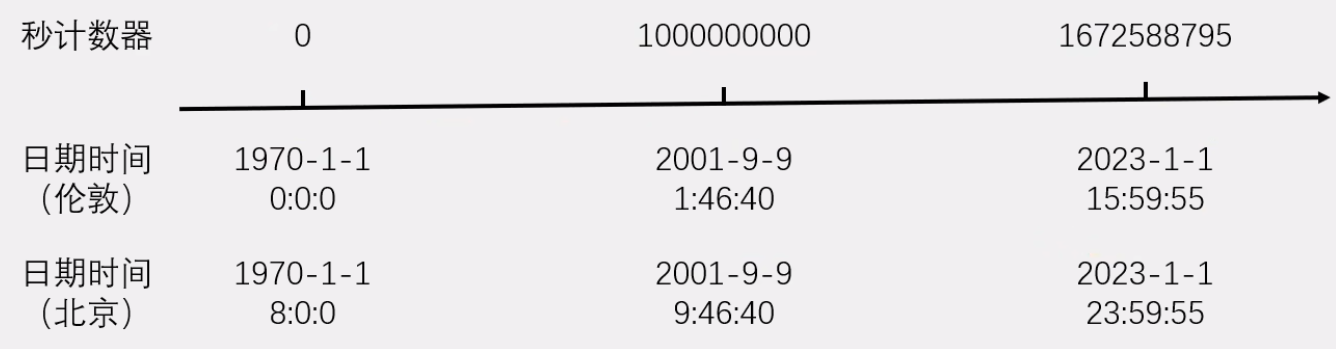
- Unix时间戳(UnixTimestamp)定义为从UTC/GMT的1970年1月1日0时0分0秒开始所经过的秒数****(只用秒来计数,永不进位),不考虑闰秒(时间戳是一个计数器数值,计算机领域知识点,别的地方也通用)
- 时间戳存储在一个秒计数器中,秒计数器为32位/64位的整型变量(32位2038年到头,如果是无符号就2106年,有生之年吧,但现在64位使用就高枕无忧了)
- 世界上所有时区的秒计数器相同,不同时区通过添加偏移来得到当地时间
对于计算器来说一个永不进位的数据,无论是存储还是计算,都是非常方便的,因此在计算程序的底层,应用非常广泛。需要给人类观看时候,就转换成年月日时分秒这个的格式就行了。
【使用好处】:
①简化硬件电路:在设计RTC硬件电路的时候,直接弄一个很大的秒寄存器就行了,不需要考虑年月日进位大小月平年论润,非常友好。
②进行时间间隔的计算非常方便。
③存储方便,只需要一个很大的变量表示秒数。
【使用一点坏处】:
比较占用软件资源,在每次进行秒计数器和日期转换时,都需要经过复杂计算。但好在计算的步骤都是固定的,因此C语言已经帮我们写好了(Time.h),我们只需要调用即可。
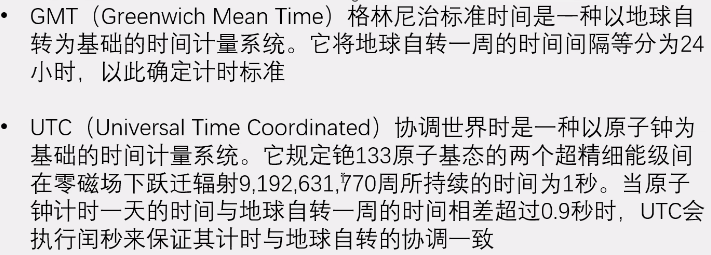
1.1.2 GMT/UTC
1.1.3 时间戳转换
【在线工具推荐】https://tool.lu/timestamp/
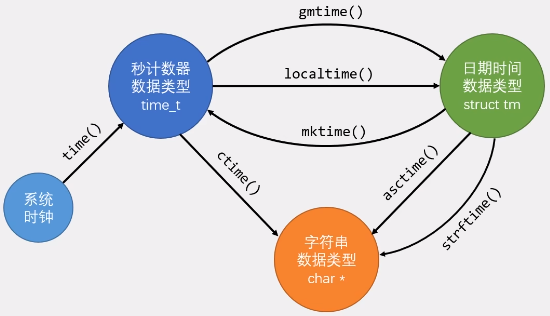
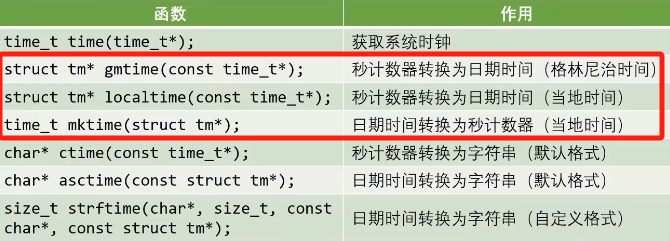
C语言的time.h模块提供了时间获取和时间戳转换的相关函数,可以方便地进行秒计数器、日期时间和字符串之间的转换
秒计数器数据类型time_t:本身的int64位的数据类型
日期时间数据类型struct tm:
字符串数据类型char *:
【要不,自己敲?】
1.2 BKP外设
1.2.1 BKP简介
- BKP(Backup Registers)备份寄存器(知道是什么,会读写这些数据寄存器即可)
- BKP可用于存储用户应用程序数据。当VDD(2.0
3.6V)电源被切断,他们仍然由VBAT(1.83.6V)维持供电。当系统在待机模式下被唤醒,或系统复位或电源复位时,他们也不会被复位
- TAMPER引脚产生的侵入事件将所有备份寄存器内容清除
- RTC引脚输出RTC校准时钟、RTC闹钟脉冲或者秒脉冲
- 存储RTC时钟校准寄存器
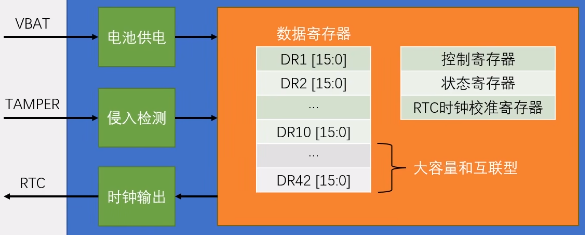
- 用户数据存储容量:20字节(中容量和小容量)/84字节(大容量和互联型
1.2.2 BKP基本结构
橙色的是后背区域,除了BKP还有RTC电路。STM32后备区的特性就是的那个VDD主电源掉电时,后备区仍然可以由VBAT的备用电池供电。当VDD主电源上电时候,后背区域会由VBAT切换到VDD,可以节省电池电量。
1.3 RTC外设
1.3.1 简介
RTC(Real Time Clock)实时时钟
RTC是一个独立的定时器,可为系统提供时钟和日历的功能
RTC和时钟配置系统处于后备区域,系统复位时数据不清零,VDD(2.03.6V)断电后可借助VBAT(1.83.6V)供电继续走时
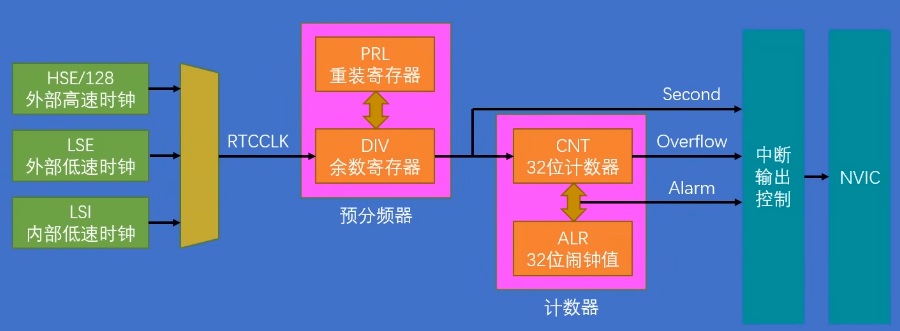
32位的可编程计数器,可对应Unix时间戳的秒计数器****(只有一个秒寄存器,了解时间戳概念后很好理解)
20位的可编程预分频器,可适配不同频率的输入时钟(确保给到计数器的是1Hz的频率)
可选择三种RTC时钟源:****(LSE主要就是供RTC的,只有这一路时钟可以通过VBAT备用电池供电,上下两路用于特殊情况备选)
HSE时钟除以128(通常为8MHz/128)
LSE振荡器时钟(通常为32.768KHz)——计算比较方便2^15=32768****(设计一个15位计数器,即可1秒自然溢出一次,目前RTC实时时钟常用该晶振)
LSI振荡器时钟(40KHz)
(压力不会消失,只会转移,能吃苦就有吃不完的苦)
1.3.2 RTC框图
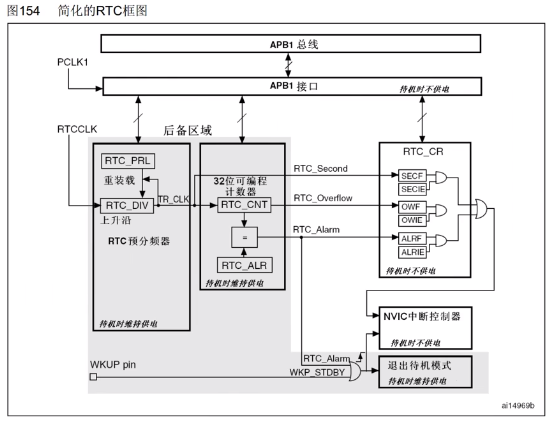
重看重看~
1.3.3 RTC基本结构
略
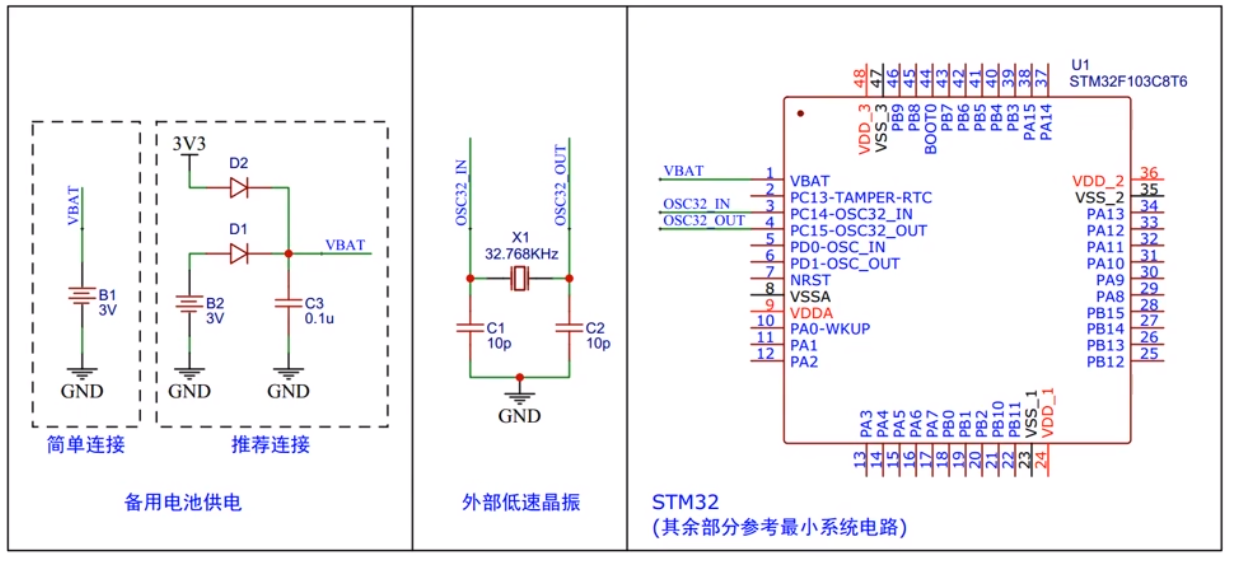
1.3.4 硬件电路
为了配合RCT外部还是需要一些电烤炉的,在最小系统板电路上,要加两部分,一电池,二外部低速晶振。
1.3.5 手册操作注意事项
执行以下操作将使能对BKP和RTC的访问:
设置RCC APB1ENR的PWREN和BKPEN,使能PWR和BKP时钟(同时开启)
设置PWR CR的DBP,使能对BKP和RTC的访问
若在读取RTC寄存器时,RTC的APB1接口曾经处于禁止状态,则软件首先必须等待RTC_CRL寄存器中的RSF位(寄存器同步标志)被硬件置1(即调用一个RTC等待同步函数,等一下RTCCLK)
必须设置RTC_CRL寄存器中的CNF位,使RTC进入配置模式后,才能写入RTC PRL、RTC CNT、RTC ALR寄存器
对RTC任何寄存器的写操作,都必须在前一次写操作结束后进行可以通过查询RTC CR寄存器中的RTOFF状态位,判断RTC寄存器是否处于更新中。仅当RTOFF状态位是1时,才可以写入RTC寄存器
手册,略~
【案例】读写备份寄存器
① 使能 RTC 和备份区域时钟:RTC 属于 APB1 总线,备份区域(BKP)需开启 PWR 时钟以解锁:
1
2
3
4
5
6
7
8
| #include "stm32f10x.h"
void RTC_BKP_Init(void) {
RCC_APB1PeriphClockCmd(RCC_APB1Periph_PWR | RCC_APB1Periph_BKP, ENABLE);
PWR_BackupAccessCmd(ENABLE);
|
② 初始化 RTC(若仅需读写备份寄存器,可简化 RTC 配置):
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
|
RCC_LSEConfig(RCC_LSE_ON);
while (RCC_GetFlagStatus(RCC_FLAG_LSERDY) == RESET);
RCC_RTCCLKConfig(RCC_RTCCLKSource_LSE);
RCC_RTCCLKCmd(ENABLE);
RTC_WaitForSynchro();
RTC_SetPrescaler(32767);
while (RTC_GetFlagStatus(RTC_FLAG_RTOFF) == RESET);
}
|
③ 写入备份寄存器(BKP 有 10 个备份寄存器:BKP_DR1~BKP_DR10):
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
|
void BKP_WriteData(uint8_t dr, uint16_t data) {
if (dr < 1 || dr > 10) return;
switch (dr) {
case 1: BKP_WriteBackupRegister(BKP_DR1, data); break;
case 2: BKP_WriteBackupRegister(BKP_DR2, data); break;
case 3: BKP_WriteBackupRegister(BKP_DR3, data); break;
case 4: BKP_WriteBackupRegister(BKP_DR4, data); break;
case 5: BKP_WriteBackupRegister(BKP_DR5, data); break;
case 6: BKP_WriteBackupRegister(BKP_DR6, data); break;
case 7: BKP_WriteBackupRegister(BKP_DR7, data); break;
case 8: BKP_WriteBackupRegister(BKP_DR8, data); break;
case 9: BKP_WriteBackupRegister(BKP_DR9, data); break;
case 10: BKP_WriteBackupRegister(BKP_DR10, data); break;
}
}
|
④ 读取备份寄存器:
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
|
uint16_t BKP_ReadData(uint8_t dr) {
if (dr < 1 || dr > 10) return 0;
switch (dr) {
case 1: return BKP_ReadBackupRegister(BKP_DR1);
case 2: return BKP_ReadBackupRegister(BKP_DR2);
case 3: return BKP_ReadBackupRegister(BKP_DR3);
case 4: return BKP_ReadBackupRegister(BKP_DR4);
case 5: return BKP_ReadBackupRegister(BKP_DR5);
case 6: return BKP_ReadBackupRegister(BKP_DR6);
case 7: return BKP_ReadBackupRegister(BKP_DR7);
case 8: return BKP_ReadBackupRegister(BKP_DR8);
case 9: return BKP_ReadBackupRegister(BKP_DR9);
case 10: return BKP_ReadBackupRegister(BKP_DR10);
default: return 0;
}
}
|
⑤ 主函数使用示例:写入并读取备份寄存器数据:
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
| int main(void) {
uint16_t write_data = 0x1234;
uint16_t read_data;
RTC_BKP_Init();
BKP_WriteData(1, write_data);
read_data = BKP_ReadData(1);
while (1) {
}
}
|
【案例】实时时钟
① 使能相关时钟并解锁备份区域:RTC 依赖 LSE(外部低速时钟),需开启 PWR、BKP 时钟并解锁备份区域:
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
| #include "stm32f10x.h"
typedef struct {
uint8_t hour;
uint8_t min;
uint8_t sec;
uint8_t week;
uint8_t day;
uint8_t month;
uint16_t year;
} RTC_TimeTypeDef;
void RTC_Init(void) {
RCC_APB1PeriphClockCmd(RCC_APB1Periph_PWR | RCC_APB1Periph_BKP, ENABLE);
PWR_BackupAccessCmd(ENABLE);
|
② 配置 RTC 时钟源(LSE,32.768kHz):
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
|
if (BKP_ReadBackupRegister(BKP_DR1) != 0x5A5A) {
RCC_LSEConfig(RCC_LSE_OFF);
while (RCC_GetFlagStatus(RCC_FLAG_LSESTB) != RESET);
RCC_LSEConfig(RCC_LSE_ON);
while (RCC_GetFlagStatus(RCC_FLAG_LSERDY) == RESET);
RCC_RTCCLKConfig(RCC_RTCCLKSource_LSE);
RCC_RTCCLKCmd(ENABLE);
RTC_WaitForSynchro();
RTC_EnterConfigMode();
RTC_SetPrescaler(32767);
RTC_ExitConfigMode();
BKP_WriteBackupRegister(BKP_DR1, 0x5A5A);
} else {
RTC_WaitForSynchro();
}
}
|
③ 实现 RTC 时间设置函数(将结构体时间写入 RTC 计数器):
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
|
uint32_t RTC_CalcSec(RTC_TimeTypeDef *time) {
uint32_t sec = 0;
uint16_t year = time->year;
uint8_t month = time->month;
uint8_t day = time->day;
for (uint16_t y = 2000; y < year; y++) {
sec += (y % 4 == 0) ? 31622400 : 31536000;
}
uint8_t month_days[12] = {31,28,31,30,31,30,31,31,30,31,30,31};
for (uint8_t m = 1; m < month; m++) {
sec += month_days[m-1] * 86400;
if (m == 2 && year % 4 == 0) sec += 86400;
}
sec += (day - 1) * 86400;
sec += time->hour * 3600;
sec += time->min * 60;
sec += time->sec;
return sec;
}
void RTC_SetTime(RTC_TimeTypeDef *time) {
uint32_t sec = RTC_CalcSec(time);
RTC_EnterConfigMode();
RTC_SetCounter(sec);
RTC_ExitConfigMode();
}
|
④ 实现 RTC 时间读取函数(从 RTC 计数器解析为结构体时间):
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
|
void RTC_CalcTime(uint32_t sec, RTC_TimeTypeDef *time) {
uint32_t temp = sec;
uint16_t year = 2000;
while (1) {
uint32_t year_sec = (year % 4 == 0) ? 31622400 : 31536000;
if (temp < year_sec) break;
temp -= year_sec;
year++;
}
time->year = year;
uint8_t month = 1;
uint8_t month_days[12] = {31,28,31,30,31,30,31,31,30,31,30,31};
if (year % 4 == 0) month_days[1] = 29;
while (1) {
uint32_t month_sec = month_days[month-1] * 86400;
if (temp < month_sec) break;
temp -= month_sec;
month++;
}
time->month = month;
time->day = temp / 86400 + 1;
temp %= 86400;
time->hour = temp / 3600;
temp %= 3600;
time->min = temp / 60;
time->sec = temp % 60;
uint32_t total_days = sec / 86400;
time->week = (total_days + 6) % 7;
if (time->week == 0) time->week = 7;
}
void RTC_GetTime(RTC_TimeTypeDef *time) {
uint32_t sec = RTC_GetCounter();
RTC_CalcTime(sec, time);
}
|
⑤ 主函数使用示例:初始化 RTC,设置时间后循环读取:
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
| int main(void) {
RTC_TimeTypeDef rtc_time;
RTC_Init();
if (BKP_ReadBackupRegister(BKP_DR1) == 0x5A5A) {
}
while (1) {
RTC_GetTime(&rtc_time);
delay_ms(1000);
}
}
|
⑥ 关键说明:RTC 计数器以秒为单位累计时间,通过计算从基准年(如 2000 年)到当前时间的总秒数实现时间管理;备份寄存器BKP_DR1用于标记是否首次配置,避免每次上电重复初始化 LSE。
二、PWR电源控制
2.1 简介
- PWR(Power Control)电源控制
- PWR负责管理STM32内部的电源供电部分,可以实现可编程电压监测器和低功耗模式的功能
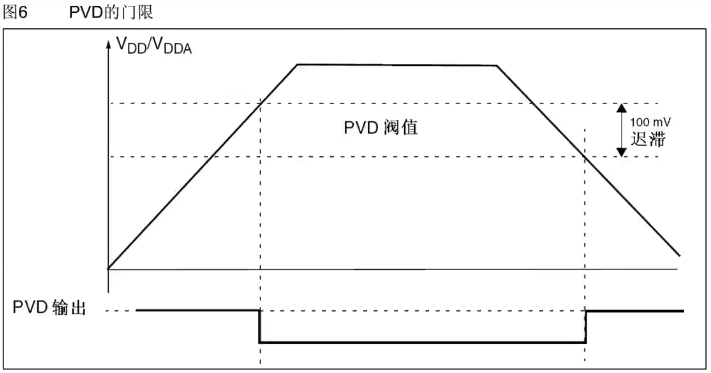
- 可编程电压监测器(PVD)可以监控VDD电源电压,当VDD下降到PVD阀值以下或上升到PVD阀值之上时,PVD会触发中断,用于执行紧急关闭任务
- 低功耗模式包括睡眠模式(Sleep)、停机模式(Stop)和待机模式(Standby),可在系统空闲时,降低STM32的功耗,延长设备使用时间(低功耗模式我们需要考虑关闭那些硬件,保留那些硬件,以及如何去唤醒,用关闭不同程度的硬件来区分不同模式)
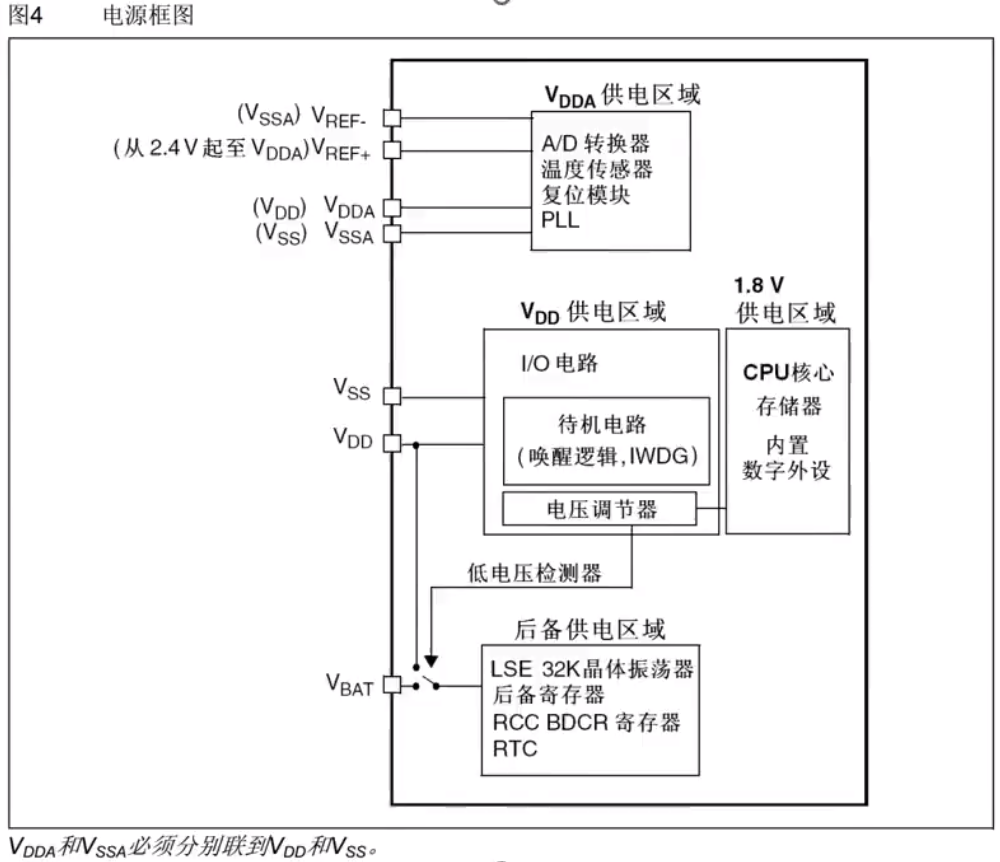
2.2 电源框图

核心供电靠1.8V运行,只要需要进行外设交流时候才通过IO电路转换到3.3V。
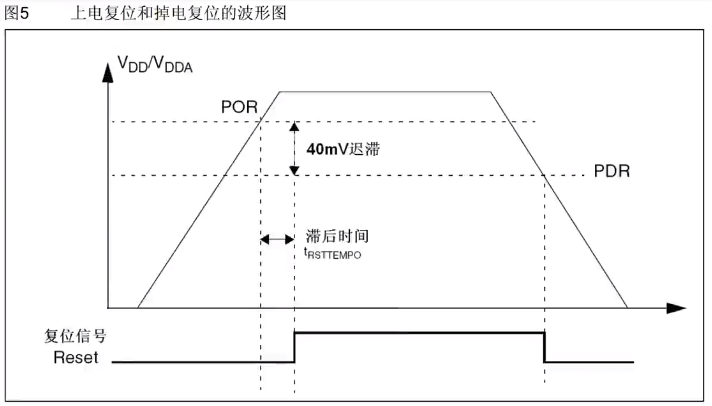
2.3 电压监测
当VDD或VDDA电压过低时,内部电路直接产生复位,让STM32不要乱操作。具体数值范围查看手册。
可以指定电压阈值,PVD中断是外部触发的。因为低功耗唤醒只有外部触发模式。
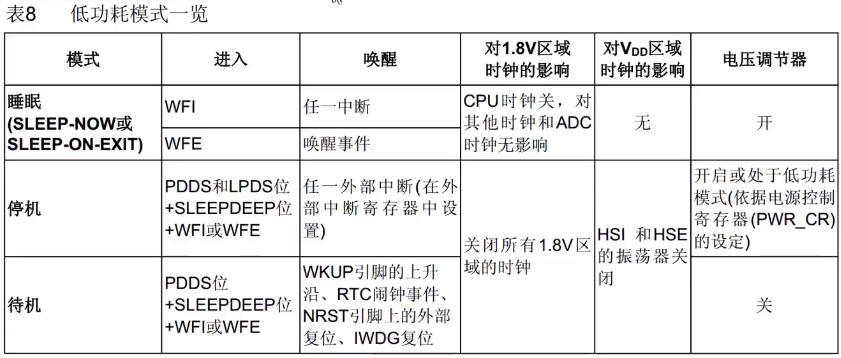
2.4 低功耗模式
2.4.1 简介
- 关闭电路通常有两种做法,一个是关闭时钟,一个是关闭电源。关闭时钟,所有的运算和设计时序的操作都会暂停,但是寄存器和存储器里面保存的数据还可以维持,不会消失。关闭电源,所有操作和数据都会丢失,更省电。
- 用PDDS标志位来区分是停机模式还是待机模式。
- WFI要用外部中断唤醒,WFE要用外部事件唤醒。(非常省电,需要外部敲醒)
- 待机模式需要指定信号唤醒!关闭状态严重,内部存储器数据和寄存器数据均丢失。和停机模式一样,不会主动关闭LSI/LSE两个低速时钟,用于维持,RTC和IWDG看门狗。
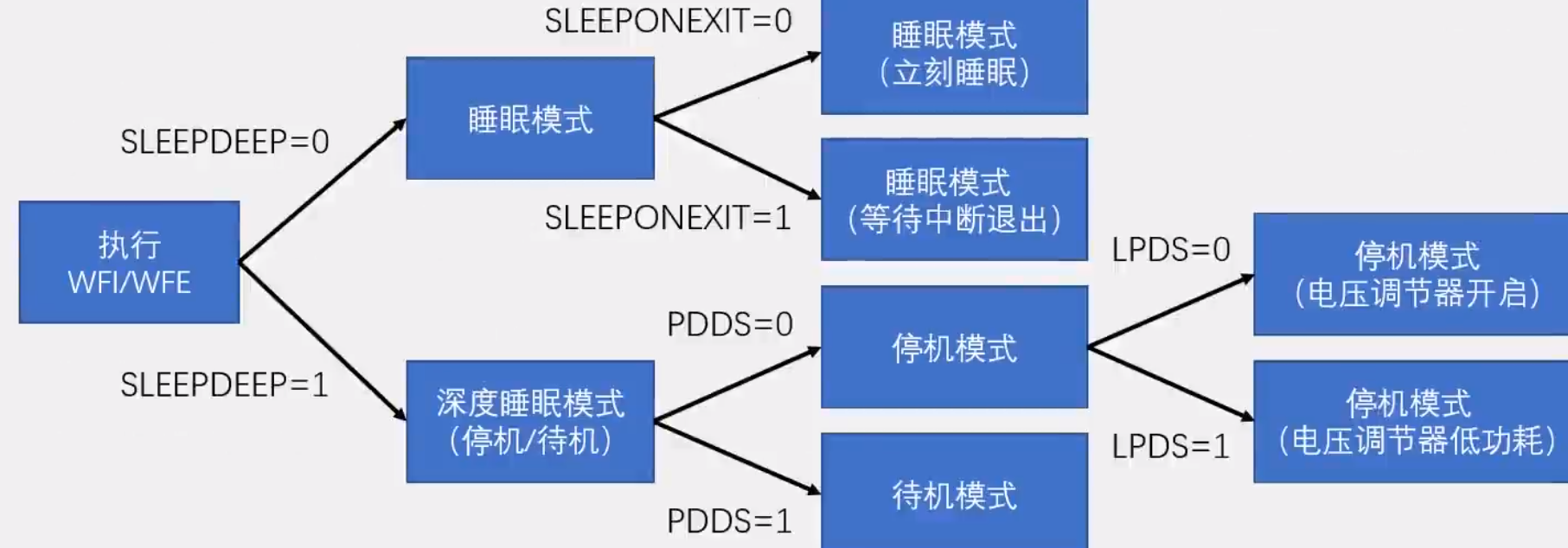
2.4.2 模式选择
执行Fl(Wait For Interrupt)或者WFE(Wait For Event)指令后STM32进入低功耗模式。
2.4.3 睡眠模式
- 执行完WFI/WFE指令后,STM32进入睡眠模式,程序暂停运行,唤醒后程序从暂停的地方继续运行
- SLEEPONEXIT位决定STM32执行完WFI或WFE后,是立刻进入睡眠还是等STM32从最低优先级的中断处理程序中退出时进入睡眠
- 在睡眠模式下,所有的1/0引脚都保持它们在运行模式时的状态
- WFI指令进入睡眠模式,可被任意一个NVIC响应的中断唤醒
- WFE指令进入睡眠模式,可被唤醒事件唤醒
2.4.4 停止模式
- 执行完WFI/WFE指令后,STM32进入停止模式,程序暂停运行,唤醒后程序从暂停的地方继续运行
- 1.8V供电区域的所有时钟都被停止,PLL、HSI和HSE被禁止,SRAM和寄存器内容被保留下来
- 在停止模式下,所有的IO引脚都保持它们在运行模式时的状态
- 当一个中断或唤醒事件导致退出停止模式时,HSI被选为系统时钟****(因此第一时间要启动HSE,配置主频)
- 当电压调节器处于低功耗模式下,系统从停止模式退出时,会有一段额外的启动延时
- WFI指令进入停止模式,可被任意一个EXTI中断唤醒
- WFE指令进入停止模式,可被任意一个EXTI事件唤醒
2.4.5 待机模式
- 执行完WFI/WFE指令后,STM32进入待机模式,唤醒后程序从头开始运行
- 整个1.8V供电区域被断电,PLL、HSI和HSE也被断电,SRAM和寄存器内容丢失,只有备份的寄存器和待机电路维持供电
- 在待机模式下,所有的IO引脚变为高阻态(浮空输入)
- WKUP引脚的上升沿、RTC闹钟事件的上升沿、NRST引脚上外部复位、IWDG复位退出待机模式
手册,略~
【案例】修改主频
① 使能 PWR 时钟:PWR 属于 APB1 总线,需先开启其时钟才能配置电源控制:
1
2
3
4
5
| #include "stm32f10x.h"
void PWR_Config(void) {
RCC_APB1PeriphClockCmd(RCC_APB1Periph_PWR, ENABLE);
}
|
② 配置系统时钟源及主频切换基础(以 STM32F103 为例,支持 HSI、HSE 作为 PLL 输入,通过 PLL 倍频生成系统时钟):
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
|
#define SYSCLK_8MHz 0
#define SYSCLK_72MHz 1
#define SYSCLK_48MHz 2
#define SYSCLK_36MHz 3
void RCC_ChangeSysClock(uint8_t clk_mode) {
RCC_SYSCLKConfig(RCC_SYSCLKSource_HSI);
RCC_PLLCmd(DISABLE);
while (RCC_GetFlagStatus(RCC_FLAG_PLLRDY) != RESET);
switch (clk_mode) {
case SYSCLK_8MHz:
RCC_SYSCLKConfig(RCC_SYSCLKSource_HSI);
break;
case SYSCLK_72MHz:
RCC_HSEConfig(RCC_HSE_ON);
while (RCC_GetFlagStatus(RCC_FLAG_HSERDY) == RESET);
RCC_PLLConfig(RCC_PLLSource_HSE_Div1, RCC_PLLMul_9);
RCC_PLLCmd(ENABLE);
while (RCC_GetFlagStatus(RCC_FLAG_PLLRDY) == RESET);
RCC_SYSCLKConfig(RCC_SYSCLKSource_PLLCLK);
break;
case SYSCLK_48MHz:
RCC_HSEConfig(RCC_HSE_ON);
while (RCC_GetFlagStatus(RCC_FLAG_HSERDY) == RESET);
RCC_PLLConfig(RCC_PLLSource_HSE_Div1, RCC_PLLMul_6);
RCC_PLLCmd(ENABLE);
while (RCC_GetFlagStatus(RCC_FLAG_PLLRDY) == RESET);
RCC_SYSCLKConfig(RCC_SYSCLKSource_PLLCLK);
break;
case SYSCLK_36MHz:
RCC_HSEConfig(RCC_HSE_ON);
while (RCC_GetFlagStatus(RCC_FLAG_HSERDY) == RESET);
RCC_PLLConfig(RCC_PLLSource_HSE_Div1, RCC_PLLMul_4_5);
RCC_PLLCmd(ENABLE);
while (RCC_GetFlagStatus(RCC_FLAG_PLLRDY) == RESET);
RCC_SYSCLKConfig(RCC_SYSCLKSource_PLLCLK);
break;
}
RCC_HCLKConfig(RCC_SYSCLK_Div1);
RCC_PCLK1Config(RCC_HCLK_Div2);
RCC_PCLK2Config(RCC_HCLK_Div1);
}
|
③ 结合 PWR 实现低功耗主频切换(如进入睡眠模式前降频):
1
2
3
4
5
6
7
8
9
10
11
|
void PWR_EnterSleepWithLowFreq(void) {
RCC_ChangeSysClock(SYSCLK_36MHz);
PWR_EnterSTOPMode(PWR_Regulator_ON, PWR_STOPEntry_WFE);
RCC_ChangeSysClock(SYSCLK_72MHz);
}
|
④ 主函数使用示例:动态切换主频并测试:
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
| int main(void) {
PWR_Config();
RCC_ChangeSysClock(SYSCLK_72MHz);
while (1) {
delay_ms(5000);
RCC_ChangeSysClock(SYSCLK_48MHz);
delay_ms(5000);
PWR_EnterSleepWithLowFreq();
}
}
|
⑤ 关键说明:STM32 主频由 PLL 倍频决定,切换时需先切到 HSI 再重新配置 PLL;APB1 外设时钟最大 36MHz,切换主频后需确保分频后不超限;结合 PWR 的 STOP 模式可在低主频下进一步降低功耗。
【案例】睡眠模式+串口发送接收
① 使能相关时钟:开启 USART1、GPIOA、AFIO、PWR 时钟:
1
2
3
4
5
6
7
8
9
10
11
12
| #include "stm32f10x.h"
#include <string.h>
#define RX_BUF_SIZE 50
uint8_t rx_buf[RX_BUF_SIZE];
uint16_t rx_len = 0;
uint8_t rx_flag = 0;
void System_Init(void) {
RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1 | RCC_APB2Periph_GPIOA | RCC_APB2Periph_AFIO, ENABLE);
RCC_APB1PeriphClockCmd(RCC_APB1Periph_PWR, ENABLE);
|
② 配置串口 GPIO 及参数(115200-8-N-1):
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
|
GPIO_InitTypeDef GPIO_InitStructure;
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_9;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStructure);
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_10;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING;
GPIO_Init(GPIOA, &GPIO_InitStructure);
USART_InitTypeDef USART_InitStructure;
USART_InitStructure.USART_BaudRate = 115200;
USART_InitStructure.USART_WordLength = USART_WordLength_8b;
USART_InitStructure.USART_StopBits = USART_StopBits_1;
USART_InitStructure.USART_Parity = USART_Parity_No;
USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None;
USART_InitStructure.USART_Mode = USART_Mode_Tx | USART_Mode_Rx;
USART_Init(USART1, &USART_InitStructure);
|
③ 配置串口接收中断(用于唤醒睡眠模式):
1
2
3
4
5
6
7
8
9
10
11
12
|
NVIC_InitTypeDef NVIC_InitStructure;
NVIC_InitStructure.NVIC_IRQChannel = USART1_IRQn;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 1;
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 0;
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;
NVIC_Init(&NVIC_InitStructure);
USART_ITConfig(USART1, USART_IT_RXNE, ENABLE);
USART_Cmd(USART1, ENABLE);
}
|
④ 实现串口发送函数:
1
2
3
4
5
6
7
8
9
10
| void USART1_SendByte(uint8_t byte) {
while (USART_GetFlagStatus(USART1, USART_FLAG_TXE) == RESET);
USART_SendData(USART1, byte);
}
void USART1_SendString(uint8_t *str) {
while (*str) {
USART1_SendByte(*str++);
}
}
|
⑤ 编写睡眠模式进入函数(STOP 模式,可被串口中断唤醒):
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
| void Enter_SleepMode(void) {
USART1_SendString((uint8_t*)"Entering sleep mode...\r\n");
PWR_EnterSTOPMode(PWR_Regulator_ON, PWR_STOPEntry_WFE);
RCC_HSEConfig(RCC_HSE_ON);
while (RCC_GetFlagStatus(RCC_FLAG_HSERDY) == RESET);
RCC_PLLConfig(RCC_PLLSource_HSE_Div1, RCC_PLLMul_9);
RCC_PLLCmd(ENABLE);
while (RCC_GetFlagStatus(RCC_FLAG_PLLRDY) == RESET);
RCC_SYSCLKConfig(RCC_SYSCLKSource_PLLCLK);
USART1_SendString((uint8_t*)"Woken up!\r\n");
}
|
⑥ 串口中断服务函数(接收数据并唤醒):
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
| void USART1_IRQHandler(void) {
if (USART_GetITStatus(USART1, USART_IT_RXNE) != RESET) {
uint8_t data = USART_ReceiveData(USART1);
if (rx_len < RX_BUF_SIZE - 1 && data != '\r') {
rx_buf[rx_len++] = data;
} else {
rx_buf[rx_len] = '\0';
rx_flag = 1;
rx_len = 0;
}
USART_ClearITPendingBit(USART1, USART_IT_RXNE);
}
}
|
⑦ 主函数逻辑:循环接收数据,超时进入睡眠:
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
| int main(void) {
System_Init();
uint32_t sleep_timer = 0;
USART1_SendString((uint8_t*)"System initialized\r\n");
while (1) {
if (rx_flag) {
USART1_SendString((uint8_t*)"Received: ");
USART1_SendString(rx_buf);
USART1_SendString((uint8_t*)"\r\n");
rx_flag = 0;
sleep_timer = 0;
}
if (sleep_timer++ >= 5000000) {
Enter_SleepMode();
sleep_timer = 0;
}
}
}
|
⑧ 关键说明:STOP 模式下系统时钟关闭,唤醒后需重新初始化 PLL 恢复主频;串口接收中断可作为唤醒源,确保外部数据能唤醒设备;进入睡眠前发送提示信息,唤醒后重新配置时钟并反馈状态。
【案例】停止模式+对射式红外传感器计次
① 使能相关时钟:开启 GPIO(传感器引脚)、EXTI(外部中断)、PWR 时钟:
1
2
3
4
5
6
7
8
| #include "stm32f10x.h"
uint32_t count = 0;
void System_Init(void) {
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA | RCC_APB2Periph_AFIO, ENABLE);
RCC_APB1PeriphClockCmd(RCC_APB1Periph_PWR, ENABLE);
|
② 配置对射式红外传感器引脚(PA0)为输入,用于触发外部中断:
1
2
3
4
5
6
|
GPIO_InitTypeDef GPIO_InitStructure;
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_0;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPU;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStructure);
|
③ 配置外部中断(EXTI0),由传感器信号触发:
1
2
3
4
5
6
7
8
|
EXTI_InitTypeDef EXTI_InitStructure;
GPIO_EXTILineConfig(GPIO_PortSourceGPIOA, GPIO_PinSource0);
EXTI_InitStructure.EXTI_Line = EXTI_Line0;
EXTI_InitStructure.EXTI_Mode = EXTI_Mode_Interrupt;
EXTI_InitStructure.EXTI_Trigger = EXTI_Trigger_Falling;
EXTI_InitStructure.EXTI_LineCmd = ENABLE;
EXTI_Init(&EXTI_InitStructure);
|
④ 配置 NVIC 中断优先级(用于中断唤醒停止模式):
1
2
3
4
5
6
7
8
|
NVIC_InitTypeDef NVIC_InitStructure;
NVIC_InitStructure.NVIC_IRQChannel = EXTI0_IRQn;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 0;
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 0;
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;
NVIC_Init(&NVIC_InitStructure);
}
|
⑤ 实现停止模式(STOP)进入函数:
1
2
3
4
5
6
7
8
9
10
11
12
| void Enter_StopMode(void) {
PWR_EnterSTOPMode(PWR_Regulator_LowPower, PWR_STOPEntry_WFI);
RCC_HSEConfig(RCC_HSE_ON);
while (RCC_GetFlagStatus(RCC_FLAG_HSERDY) == RESET);
RCC_PLLConfig(RCC_PLLSource_HSE_Div1, RCC_PLLMul_9);
RCC_PLLCmd(ENABLE);
while (RCC_GetFlagStatus(RCC_FLAG_PLLRDY) == RESET);
RCC_SYSCLKConfig(RCC_SYSCLKSource_PLLCLK);
}
|
⑥ 外部中断服务函数(传感器触发时计次):
1
2
3
4
5
6
7
8
9
10
| void EXTI0_IRQHandler(void) {
if (EXTI_GetITStatus(EXTI_Line0) != RESET) {
count++;
for (uint32_t i = 0; i < 10000; i++);
EXTI_ClearITPendingBit(EXTI_Line0);
}
}
|
⑦ 主函数逻辑:循环进入停止模式,等待传感器触发唤醒并计次:
1
2
3
4
5
6
7
8
9
10
11
| int main(void) {
System_Init();
while (1) {
Enter_StopMode();
}
}
|
【案例】待机模式+实时时钟
① 使能相关时钟:开启 RTC、PWR、BKP 时钟,用于实时时钟和待机模式控制:
1
2
3
4
5
6
7
8
9
10
11
| #include "stm32f10x.h"
typedef struct {
uint8_t hour;
uint8_t min;
uint8_t sec;
} RTC_TimeTypeDef;
RTC_TimeTypeDef rtc_time = {0, 0, 0};
uint8_t wakeup_flag = 0;
|
② 初始化 RTC(使用 LSE 时钟,配置闹钟唤醒功能):
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
| void RTC_Init(void) {
RCC_APB1PeriphClockCmd(RCC_APB1Periph_PWR | RCC_APB1Periph_BKP, ENABLE);
PWR_BackupAccessCmd(ENABLE);
if (BKP_ReadBackupRegister(BKP_DR1) != 0xAA55) {
RCC_LSEConfig(RCC_LSE_ON);
while (RCC_GetFlagStatus(RCC_FLAG_LSERDY) == RESET);
RCC_RTCCLKConfig(RCC_RTCCLKSource_LSE);
RCC_RTCCLKCmd(ENABLE);
RTC_WaitForSynchro();
RTC_EnterConfigMode();
RTC_SetPrescaler(32767);
RTC_SetCounter(0);
RTC_ExitConfigMode();
BKP_WriteBackupRegister(BKP_DR1, 0xAA55);
} else {
RTC_WaitForSynchro();
}
RTC_EnterConfigMode();
RTC_SetAlarm(RTC_GetCounter() + 86400);
RTC_ExitConfigMode();
RTC_ITConfig(RTC_IT_ALR, ENABLE);
NVIC_InitTypeDef NVIC_InitStructure;
NVIC_InitStructure.NVIC_IRQChannel = RTCAlarm_IRQn;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 0;
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 0;
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;
NVIC_Init(&NVIC_InitStructure);
}
|
③ 实现待机模式进入函数:
1
2
3
4
5
6
7
8
9
| void Enter_StandbyMode(void) {
PWR_ClearFlag(PWR_FLAG_WU);
RTC_ClearFlag(RTC_FLAG_ALR);
PWR_WakeUpPinCmd(DISABLE);
PWR_EnterSTANDBYMode();
}
|
④ RTC 闹钟中断服务函数(唤醒待机模式):
1
2
3
4
5
6
7
8
9
10
11
12
13
| void RTCAlarm_IRQHandler(void) {
if (RTC_GetITStatus(RTC_IT_ALR) != RESET) {
wakeup_flag = 1;
RTC_EnterConfigMode();
RTC_SetAlarm(RTC_GetCounter() + 86400);
RTC_ExitConfigMode();
RTC_ClearITPendingBit(RTC_IT_ALR);
EXTI_ClearITPendingBit(EXTI_Line17);
}
}
|
⑤ 读取当前 RTC 时间函数:
1
2
3
4
5
6
| void RTC_GetTime(RTC_TimeTypeDef *time) {
uint32_t sec = RTC_GetCounter();
time->hour = sec / 3600;
time->min = (sec % 3600) / 60;
time->sec = sec % 60;
}
|
⑥ 主函数逻辑:初始化后进入待机,被 RTC 闹钟唤醒后处理任务:
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
| int main(void) {
if (PWR_GetFlagStatus(PWR_FLAG_SB) != RESET) {
wakeup_flag = 1;
PWR_ClearFlag(PWR_FLAG_SB);
}
RTC_Init();
if (wakeup_flag) {
RTC_GetTime(&rtc_time);
wakeup_flag = 0;
}
Enter_StandbyMode();
while (1) {
}
}
|
三、WDG看门狗
3.1 简介
WDG(Watchdog)看门狗
看门狗可以监控程序的运行状态,当程序因为设计漏洞(无法预料)、硬件故障、电磁干扰等原因,出现卡死或跑飞现象时,看门狗能及时复位程序避免程序陷入长时间的罢工状态,保证系统的可靠性和安全性
看门狗本质上是一个定时器,当指定时间范围内,程序没有执行喂狗(重置计数器)操作时,看门狗硬件电路就自动产生复位信号
STM32内置两个看门狗
独立看门狗(IWDG):独立工作,对时间精度要求较低
窗口看门狗(WWDG):要求看门狗在精确计时窗口起作用(有明确喂狗清零界限)
3.2 IWDG框图
3.2.1 简介
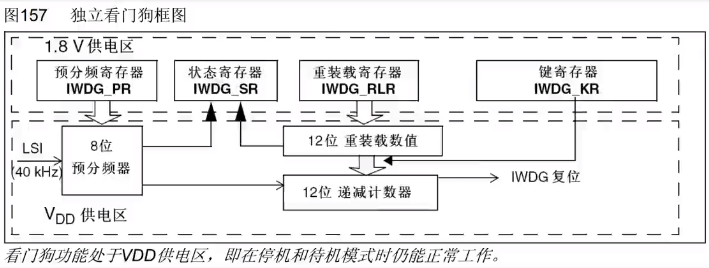
对比定时器结构。定时器产生中断,看门狗产生复位。
3.2.2 IWDG键寄存器
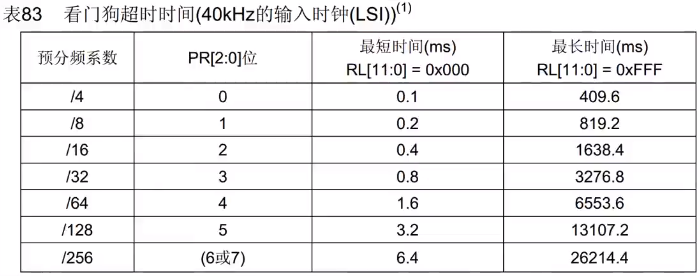
3.3 IWDG超时时间
- 超时时间:TIWDG=TLSI x PR预分频系数 x (RL+1)
- 其中:TLSI =1/FLSI
注:****超时时间40k输入时钟会在30~60kHz波动。
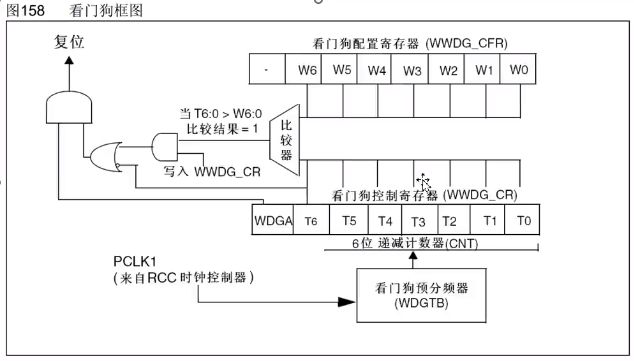
3.4 WWDG框图
3.4.1 简介
【计数器部分最晚界限】如果把T6位看作计数器的一部分,那就是整个计数器值减到0x40之后溢出;而T6当成溢出标志位,低6位当作计数器,数值减到0之后溢出。
【复位信号】程序运行状态下始终保证T6位位1,这样才能避免复位。
【最早界限】首先写入一个最早时间界限计数值到W0~6中,写入WWDG_CR,就是喂狗,一旦它比较,我们当前的计数器T6:0>窗口之W6:0,比较结果就等于1,就可以去申请复位。
也就是为狗的时候,把当前计数值和预设窗口值进行比较,若余粮充足,喂得频繁,就有问题,就会复位。
3.4.2 WWDG工作特性
- 递减计数器T[6:0]的值小于0x40时,WDG产生复位
- 递减计数器T[6:0]在窗口W[6:0]外被重新装载时,WDG产生复位
- 递减计数器T[6:01等于0x40时可以产生早期唤醒中断(EWI),死前中断(马上就要溢出复位时,用来执行一些紧急操作,比如保存重要数据,关闭危险操作),用于重装载计数器以避免WWDG复位
- 定期写入WWDG CR寄存器(喂狗)以避免WWDG复位
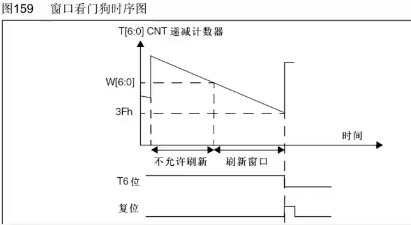 刷新窗口可以喂狗。
刷新窗口可以喂狗。
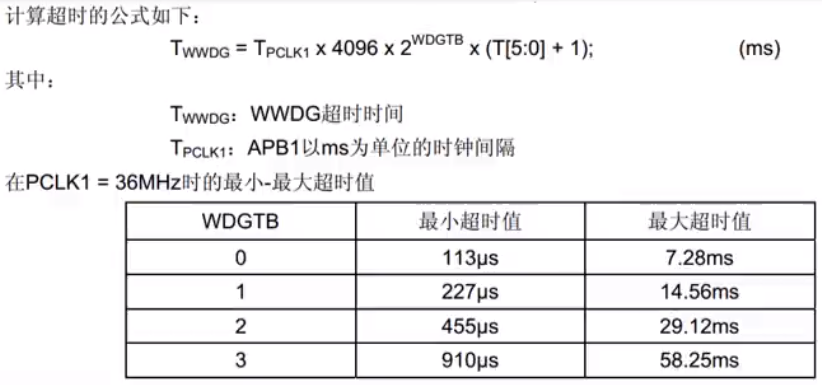
3.4.3 WWDG超时时间计算
- 超时时间:TWWDG=TPCLK1x4096xWDGTB预分频系数 x(T[5:0]+ 1)
- 窗口时间:TWIN =TPCLK1x 4096 x WDGTB预分频系数 x(T[5:0] - W[5:0])
- 其中:TPCLK1=1/FPCLK1
3.5 IWDG和WWDG对比
手册,略~
【案例】独立看门狗
① 独立看门狗(IWDG)初始化:独立看门狗使用内部低速时钟(LSI,约 40kHz),无需外部时钟,适合监测程序运行状态:
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
| #include "stm32f10x.h"
void IWDG_Init(uint16_t timeout_ms) {
IWDG_WriteAccessCmd(IWDG_WriteAccess_Enable);
IWDG_SetPrescaler(IWDG_Prescaler_64);
uint16_t reload = (uint16_t)(timeout_ms / 1.6f);
if (reload > 0xFFF) reload = 0xFFF;
IWDG_SetReload(reload);
IWDG_ReloadCounter();
IWDG_Enable();
}
|
② 喂狗函数(重置看门狗计数器,避免复位):
1
2
3
4
|
void IWDG_Feed(void) {
IWDG_ReloadCounter();
}
|
③ 主函数使用示例:定期喂狗,模拟程序正常运行;若超时未喂狗,系统会复位:
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
| int main(void) {
IWDG_Init(100);
while (1) {
IWDG_Feed();
for (uint32_t i = 0; i < 3600000; i++);
}
}
|
独立看门狗一旦使能无法关闭,需持续喂狗;超时时间由预分频器和重装载值决定,计算公式为超时时间(ms) = (重装载值 + 1) * (4^预分频器) / 40;适用于监测程序是否跑飞,若程序异常未及时喂狗,系统会自动复位。
【案例】窗口看门狗
① 窗口看门狗(WWDG)初始化:窗口看门狗使用 APB1 时钟分频后的时钟(PCLK1/4096),需设置窗口值和计数器,用于监测程序在规定时间窗口内运行:
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
| #include "stm32f10x.h"
void WWDG_Init(uint8_t tr, uint8_t wr) {
RCC_APB1PeriphClockCmd(RCC_APB1Periph_WWDG, ENABLE);
WWDG_SetPrescaler(WWDG_Prescaler_8);
WWDG_SetWindowValue(wr);
WWDG_Enable(tr);
WWDG_ClearFlag();
WWDG_EnableIT();
NVIC_InitTypeDef NVIC_InitStructure;
NVIC_InitStructure.NVIC_IRQChannel = WWDG_IRQn;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 2;
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 2;
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;
NVIC_Init(&NVIC_InitStructure);
}
|
② 喂狗函数(需在计数器 > 窗口值时调用,否则触发复位):
1
2
3
4
|
void WWDG_Feed(void) {
WWDG_SetCounter(0x7F);
}
|
③ WWDG 中断服务函数(计数器降至 0x40 时触发,可做最后处理):
1
2
3
4
| void WWDG_IRQHandler(void) {
WWDG_ClearFlag();
}
|
④ 主函数使用示例:在窗口时间内喂狗,确保程序正常运行:
1
2
3
4
5
6
7
8
9
10
11
12
13
14
| int main(void) {
WWDG_Init(0x7F, 0x5F);
while (1) {
WWDG_Feed();
for (uint32_t i = 0; i < 100000; i++);
}
}
|
窗口看门狗有严格的喂狗时间窗口(计数器 > 窗口值),过早或过晚喂狗都会触发复位;计数器从 0x7F 递减到 0x40,低于 0x40 后自动复位;适用于监测程序是否在规定时间内完成任务(如实时性要求高的场景)。
四、Flash闪存
4.1 简介
STM32F1系列的FLASH包含程序存储器、系统存储器和选项字节三个部分,通过**闪存存储器接口(外设)**可以对程序存储器和选项字节进行擦除和编程
读写FLASH的用途:
利用程序存储器的剩余空间来保存掉电不丢失的用户数据
通过在程序中编程(IAP),实现程序的自我更新
在线编程(In-Circuit Programming-ICP)用于更新程序存储器的全部内容它通过JTAG、SWD协议或系统加载程序(Bootloader)下载程序
在程序中编程(In-Application Programming-lAP)可以使用微控制器支持的任一种通信接口下载程序
4.2 闪存模块组织
闪存存储器借口寄存器为闪存的管理员,擦除和编程通过对这些寄存器操作来完成。而读取只需要使用指针直接读取即可。
4.3 Flash基本结构
整个闪存分为程序存储器、系统存储器、选项字节(配置读写保护)。
如何操作FPEC来对程序存储器和选项字节进行擦除和编程?
4.4 Flash操作
4.4.1 Flash解锁
RDPRT键=0x000000A5
KEY1 = 0x45670123
KEY2 =0xCDEF89AB
复位后,FPEC被保护,不能写入FLASHCR
在FLASH_KEYR先写入KEY1,再写入KEY2,解锁
错误的操作序列会在下次复位前锁死FPEC和FLASHCR
设置FLASH CR中的LOCK位锁住FPEC和FLASHCR
4.4.2 使用指针访问存储器
- 使用指针读指定地址下的存储器:(注意优先级,可以用括号控制)
1
| uint16_t Data=*(( __I0 uint16_t*)(0x08000000))
|
1
| *((__Io uint16_t*)(0x08000000))= 0x1234
|
读写Flash所需权限比较大,读写RAM就比较容易,因为在程序运行过程中是可读可写的。
#define __IO volatile防止编译器优化。
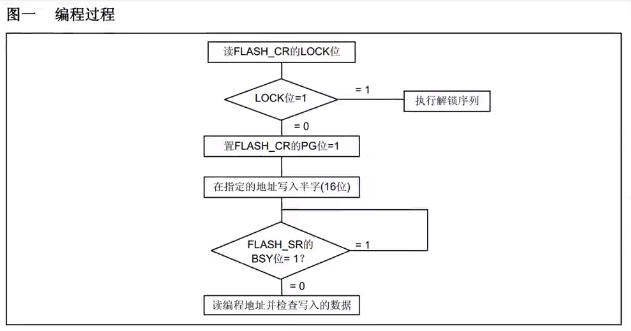
4.4.3 程序存储器编程流程图

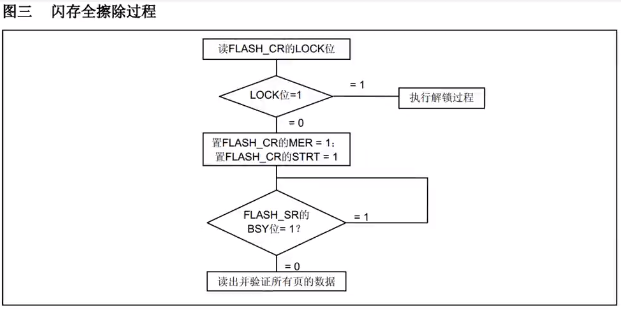
解锁,擦除,全擦除需要时间,程序会一直等待,判断寄存器BSY位是否为1,表示忙,继续循环等待,直到=0,跳出循环,全擦除结束。最后一步读出来验证工作量大就不管了。
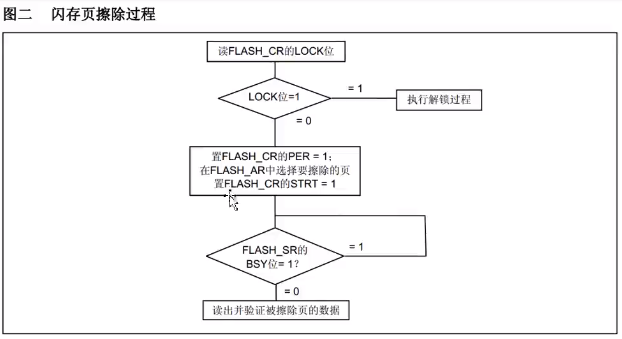
4.4.4 程序存储器页擦除流程图
同样的解锁,AR选择擦除的页,置位STRT=1开始操作。
4.4.5 程序全擦除流程图

检测到擦除之后,才执行写入操作,除非是写入0(即擦除);因为写入1可能会产生错误。
写入操作只能以半字(16位)写入操作。【字Word(32位)、半字halfWord(16位)、字节Byte(8位)】
写入8位就比较麻烦,如果想单独写入一字节的数据,还要保留另一字节数据,就必须把整页数据读到SRAM里,再随意进行SRAM数据,修改全部完成之后再把整页都擦除,再写回去。
写入32位数据分两次操作,写入很多则只需要不断循环操作就可以了。
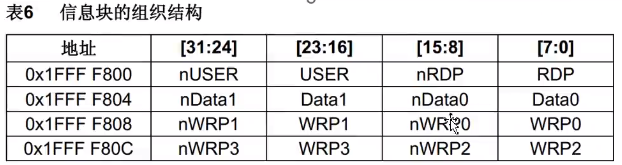
4.5 选项字节
4.5.1 选项字节简介

名称前边都带着一个n,表示再写入X数据时候,要同时在nX写入数据的反码,这样操作才是有效的,如果芯片检测到不是反码的关系,就代表数据无效有错误,对应的功能就不执行,这是一种安全保障措施。这个写入反码操作硬件会自动写入操作,不需要我们担心。函数封装好了。
- RDP:写入RDPRT键(0x000000A5)后解除读保护(默认可读)
- USER:配置硬件看门狗和进入停机/待机模式是否产生复位
- Data0/1:用户可自定义使用
- WRP0/1/2/3:配置写保护,每一个位对应保护4个存储页(中容量)
4.5.2 选项字节编程
(选项字节本身页是闪存,写入也需要擦除)
- 检查FLASH_SR的BSY位,以确认没有其他正在进行的编程操作(等待)
- 解锁FLASH_CR的OPTWRE位
- 设置FLASH CR的OPTPG位为1
- 写入要编程的半字到指定的地址
- 等待BSY位变为0
- 读出写入的地址并验证数据
4.5.3 器件电子签名
【闪存FPEC注意】:在变成过程中,任何读写内存的操作都会使CPU暂停,直到此次闪存编程结束。即内存闪存弊端,在忙的时候,代码会暂停执行,因为代码执行需要读操作,而闪存在忙,无法进行闪存读操作,程序就会暂停。这会导致你在使用内部存储,同时中断又在频繁的执行,而在读写闪存的时候,中断就无法及时响应了。比如没有缓存需要持续刷新的屏幕显示,会因此闪烁。
手册,略~
【案例】读写内部Flash
① 解锁内部 Flash:操作 Flash 前需解锁写入保护:
1
2
3
4
5
6
7
8
9
10
11
12
| #include "stm32f10x.h"
void Flash_Unlock(void) {
if (FLASH_GetStatus() == FLASH_STATUS_BSY) {
while (FLASH_GetStatus() == FLASH_STATUS_BSY);
}
if ((FLASH->CR & FLASH_CR_LOCK) != 0) {
FLASH_WriteProtectionEntry(FLASH_WRProt_Disable);
FLASH_UnlockCmd(ENABLE);
}
}
|
② 锁定内部 Flash(操作完成后锁定,防止误写):
1
2
3
4
| void Flash_Lock(void) {
FLASH_UnlockCmd(DISABLE);
FLASH_WriteProtectionEntry(FLASH_WRProt_Enable);
}
|
③ 擦除 Flash 扇区(写入前需擦除,STM32F103 每页 1KB,共 64 页):
1
2
3
4
5
6
7
8
9
10
11
12
13
14
|
uint8_t Flash_ErasePage(uint16_t page) {
if (page >= 64) return 1;
Flash_Unlock();
if (FLASH_ErasePage(0x08000000 + page * 1024) != FLASH_COMPLETE) {
Flash_Lock();
return 1;
}
Flash_Lock();
return 0;
}
|
④ 写入数据到 Flash(按半字写入,地址需对齐):
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
|
uint8_t Flash_WriteHalfWord(uint32_t addr, uint16_t *data, uint16_t len) {
if (addr < 0x08000000 || addr + len * 2 > 0x08010000) {
return 1;
}
Flash_Unlock();
for (uint16_t i = 0; i < len; i++) {
if (FLASH_ProgramHalfWord(addr + i * 2, data[i]) != FLASH_COMPLETE) {
Flash_Lock();
return 1;
}
}
Flash_Lock();
return 0;
}
|
⑤ 从 Flash 读取数据(按字节读取):
1
2
3
4
5
6
|
void Flash_ReadByte(uint32_t addr, uint8_t *buf, uint16_t len) {
for (uint16_t i = 0; i < len; i++) {
buf[i] = *(uint8_t *)(addr + i);
}
}
|
⑥ 主函数使用示例(擦除→写入→读取验证):
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
| int main(void) {
uint16_t w_data[5] = {0x1234, 0x5678, 0x9ABC, 0xDEF0, 0xAAAA};
uint8_t r_data[10];
Flash_ErasePage(63);
Flash_WriteHalfWord(0x0800FC00, w_data, 5);
Flash_ReadByte(0x0800FC00, r_data, 10);
while (1) {
}
}
|
【案例】读取芯片ID
① 读取 STM32 芯片 ID(包含设备 ID 和唯一 ID):
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
| #include "stm32f10x.h"
uint16_t Get_DeviceID(void) {
return *(uint16_t*)0x1FFFF7E8;
}
void Get_UniqueID(uint8_t *uid) {
uid[0] = *(uint8_t*)0x1FFFF7E9;
uid[1] = *(uint8_t*)0x1FFFF7EA;
uid[2] = *(uint8_t*)0x1FFFF7EB;
uid[3] = *(uint8_t*)0x1FFFF7EC;
uid[4] = *(uint8_t*)0x1FFFF7ED;
uid[5] = *(uint8_t*)0x1FFFF7EE;
uid[6] = *(uint8_t*)0x1FFFF7EF;
uid[7] = *(uint8_t*)0x1FFFF7F0;
}
|
② 主函数使用示例:
1
2
3
4
5
6
7
8
9
10
11
12
13
14
| int main(void) {
uint16_t device_id;
uint8_t unique_id[8];
device_id = Get_DeviceID();
Get_UniqueID(unique_id);
while (1) {
}
}
|
STM32标准库系列文章
STM32标准库笔记(一)-准备、GPIO、中断 | 超小韓の个人博客
STM32标准库笔记(二)-PWM、ADC、DMA | 超小韓の个人博客
STM32标准库笔记(三)-USART、I2C、SPI | 超小韓の个人博客
STM32标准库笔记(四)-BKP、RTC、PWR、WDG、FLASH | 超小韓の个人博客

