[TOC]
通信接口了解
- 通信的目的︰将一个设备的数据传送到另一个设备,扩展硬件系统
- 通信协议︰制定通信的规则,通信双方按照协议规则进行数据收发
- STM32里边有下表这么多的通讯协议(表格仅列一些常看的典型参数)
| 名称 |
引脚 |
传输模式 |
时钟 |
电平 |
设备 |
| USART |
TX、RX |
全双工 |
同/异步 |
单端 |
点对点 |
| I2C |
SCL、SDA |
半双工 |
同步 |
单端 |
多设备 |
| SPI |
SCLK、MOSI、MISO、CS |
全双工 |
同步 |
单端 |
多设备 |
| CAN |
CAN_H、CAN_L |
半双工 |
异步 |
差分 |
多设备 |
| USB |
DP、DM |
半双工 |
异步 |
差分 |
点对点 |
同步需要时钟线来保证传输数据不冲突。
【注】全双工:打电话。 半双工:对讲机。 单工:广播。
一、USART通信
1.1 串口通讯协议
通讯时钟:同步靠时钟线,异步靠比特率(用的多)
1.1.1 简介
串口是一种应用十分广泛的通讯接口,串口成本低、容易使用、通信线路简单,可实现两个设备的互相通信。单片机的串口可以使单片机与单片机、单片机与电脑、单片机与各式各样的模块互相通信,极大地扩展了单片机的应用范围,增强了单片机系统的硬件实力。

1.1.2硬件电路
- 简单双向串口通信有两根通信线(发送端TX和接收端RX)
- TX与RX要交叉连接
- 当只需单向的数据传输时,可以只接一根通信线
- 当电平标准不一致时,需要加电平转换芯片
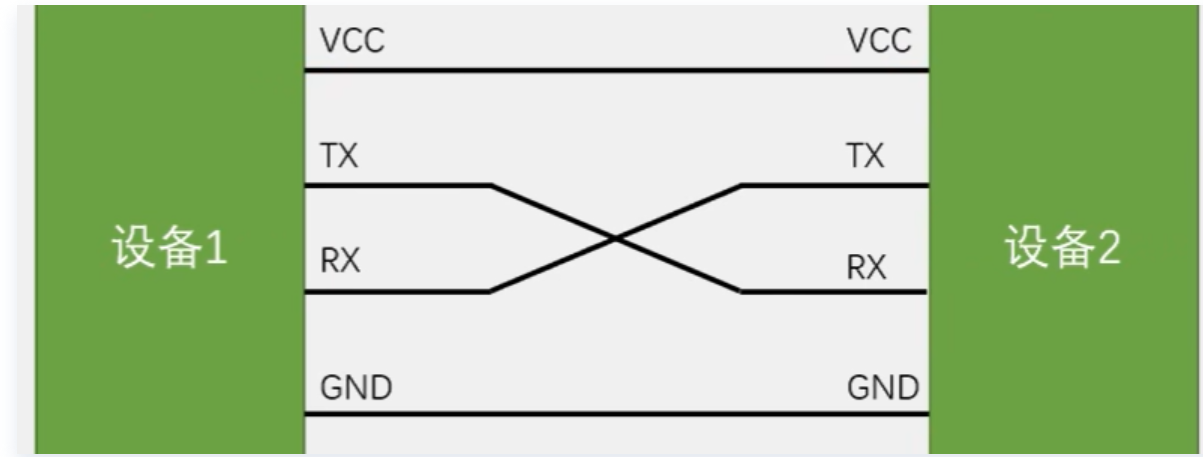
| 因为TX/RX的高低电平是相对于GND来说的,所以这三根都是通讯线,双向通信必须要连接的。VCC则看设备双方是否都有供电而考虑。 |
|
|
|
【电平标准】
电平标准是数据1和数据0的表达方式,是传输线缆中人为规定的电压与数据的对应关系,串口常用的电平标准有如下三种︰
TTL电平:+3.3V或+5V表示1,OV表示0
RS232电平(大机器):-3-15V表示1,+3+15V表示0
RS485电平:两线压差+2+6V表示1,-2-6V表示0(差分信号)抗干扰(可达上千米)
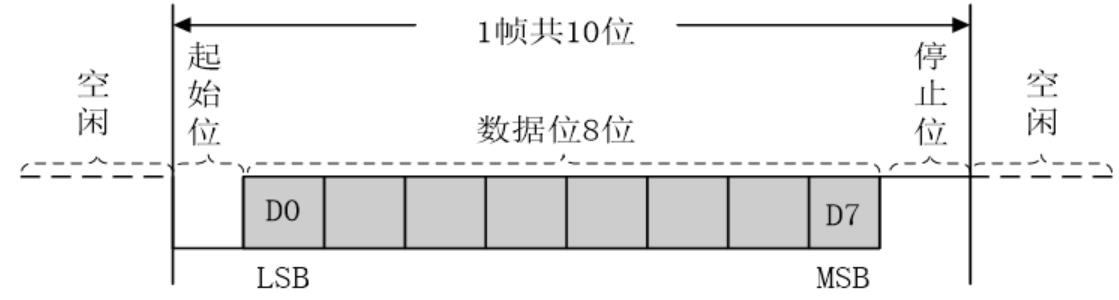
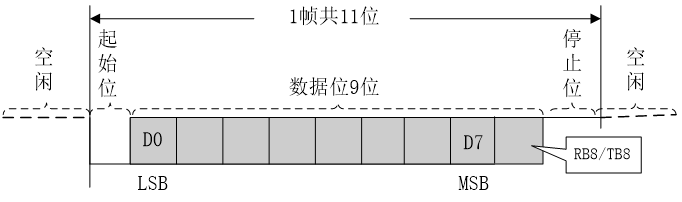
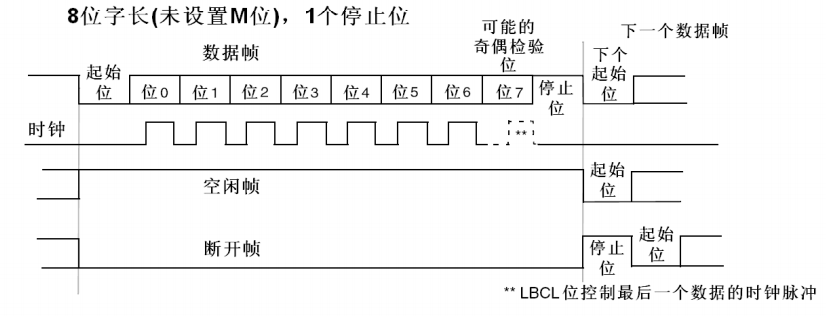
1.1.3串口参数及时序
- 波特率∶串口通信的速率(决定每隔多久发送一位)
- 起始位︰标志一个数据帧的开始,固定为低电平
- 数据位︰数据帧的有效载荷,1为高电平。0为低电平,低位先行
- 校验位︰用于数据验证,根据数据位计算得来
- 停止位︰用于数据帧间隔,固定为高电平
校验方式:****奇偶校验、和校验、CRC校验、LRC校验…..
【时序波形】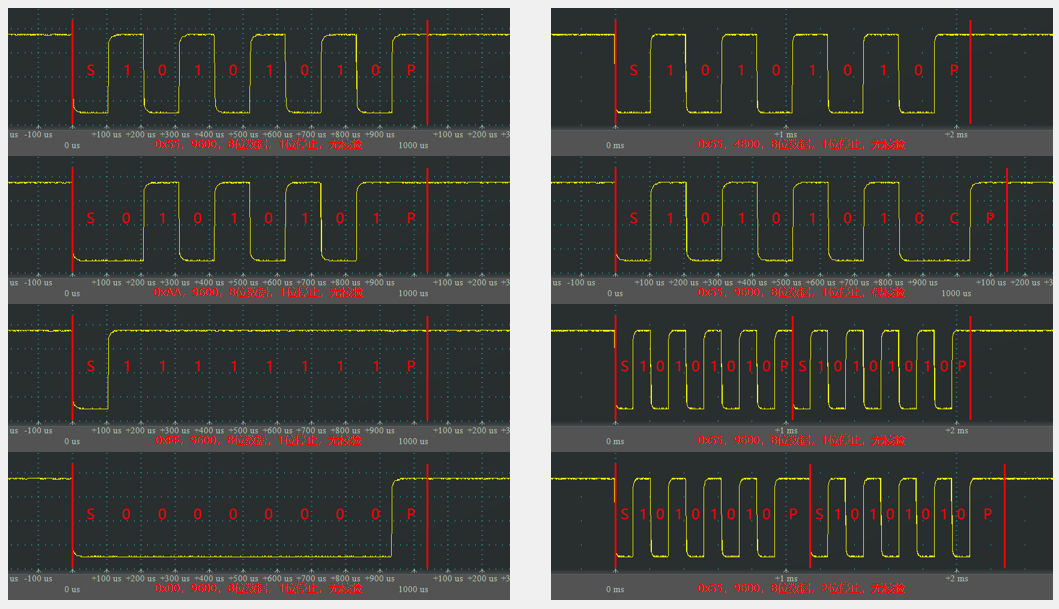
1.2USART外设
1.2.1 USART简介
注:这里的同步模式,多了一个仅支持输出的时钟,是兼容别的协议或者特殊用途而设计;不支持两个USART之间进行同步通信。因此我们主要还是学习异步通信。
- USART是STM32内部集成的硬件外设,可根据数据寄存器的一个字节数据自动生成数据帧时序,从TX引脚发送出去,也可自动接收RX引脚的数据帧时序,拼接为一个字节数据,存放在数据寄存器里。
- 自带波特率发生器,最高达4.5Mbits/s
- 可配置参数:数据位长度(8/9)、停止位长度(0.5/1/1.5/2),即间隔
- 可选校验位(无校验/奇校验/偶校验)
- 支持同步模式、硬件流控制、DMA、智能卡、IrDA(红外通信)、LIN(局域网通信协议)
【硬件流控制】如果数据发送得过快来不及接收,那么就可以通过这个来控制USART处于可收发的状态,一般不用。
- STM32F103C8T6 USART资源:USART1、USART2、USART3
注意:开启时钟时候注意挂载的总线
1.2.2 USART框图
一开始比较乱,可以先忽略图中长条状寄存器每一位的描述。
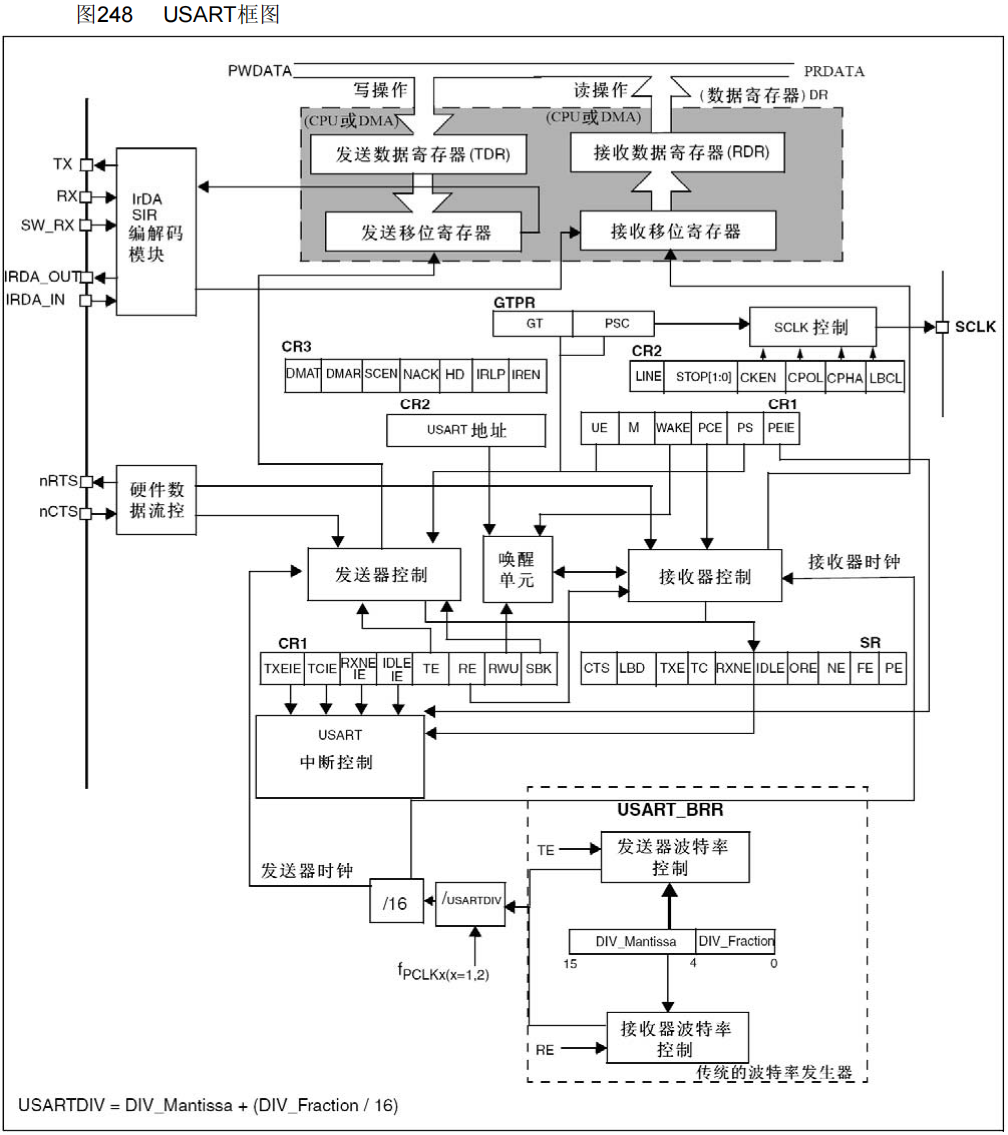
主要关注TX/RX引脚,一个发送一个接收。
DR寄存器:占用同一个地址,但是硬件上是两个寄存器,TDR发送数据寄存器、RDR接收数据寄存器。
移位寄存器:一个发送,从寄存器转移(低位往高位发送);一个接收,转移到寄存器(高位往低位接收)。通过标志位进行判断数据接收/发送完成。
发送接收器控制:
硬件数据流控:了解
SCK输出:用于兼容其他协议。
唤醒单元:(了解)串口实现挂载多设备,可以给串口分配一个地址,当发送制定地址时,此设备唤醒开始工作。当你发送别的设备地址时,别的设备就唤醒工作,没收到的就保持沉默。
中断申请位:就是状态寄存器这里的各种标志位,标志位的TXE发送寄存器空,RXNE接收寄存器非空,是判断发送和接收状态的必要标志位。(其他可以看手册)
USART中断控制:配置中断是不是能通向NVIC
波特率发生器:分频器,APB时钟进行分频,得到发送和接收移位的时钟。
1.2.3 USART基本结构
发送接收引脚是GPIO的复用输出,开发时候,如果硬工没给你画好,则需要注意引脚的划分,避免冲突。
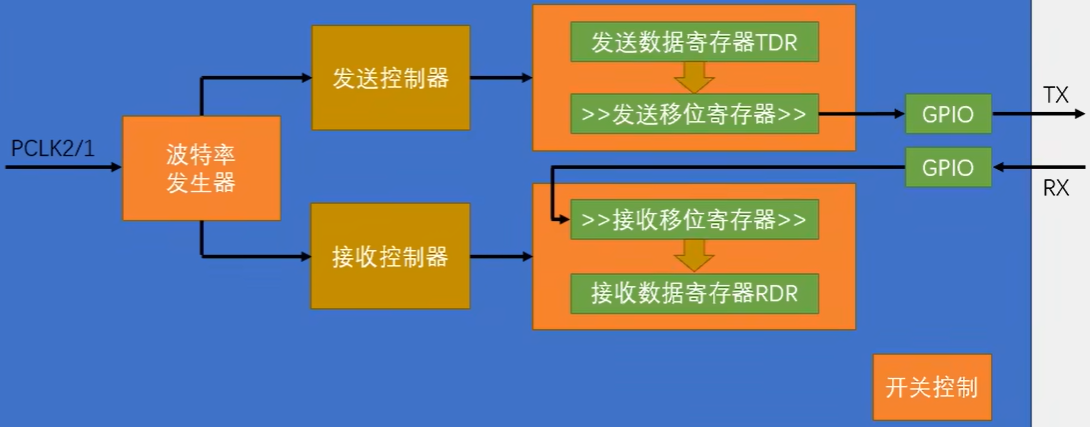
发送接收移位寄存器硬件上看着有四个,但实际软件成眠只有一个DR寄存器供我们读写。
1.3 数据帧解析
1.3.1 字长设置
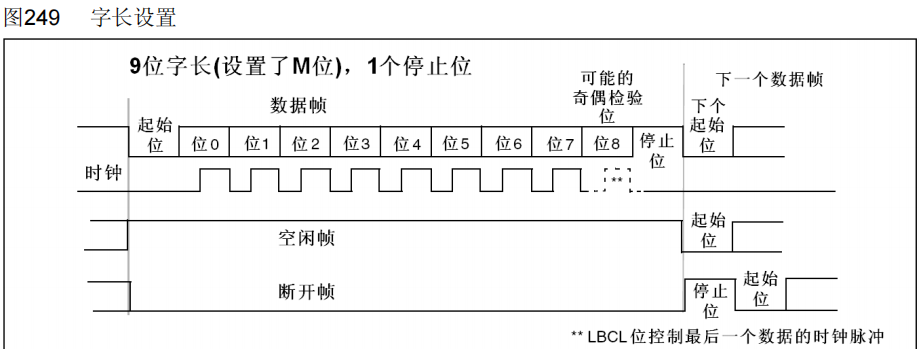

有效载荷保持1字节,会比较的…使强迫症情绪稳定。
1.3.2 配置停止位
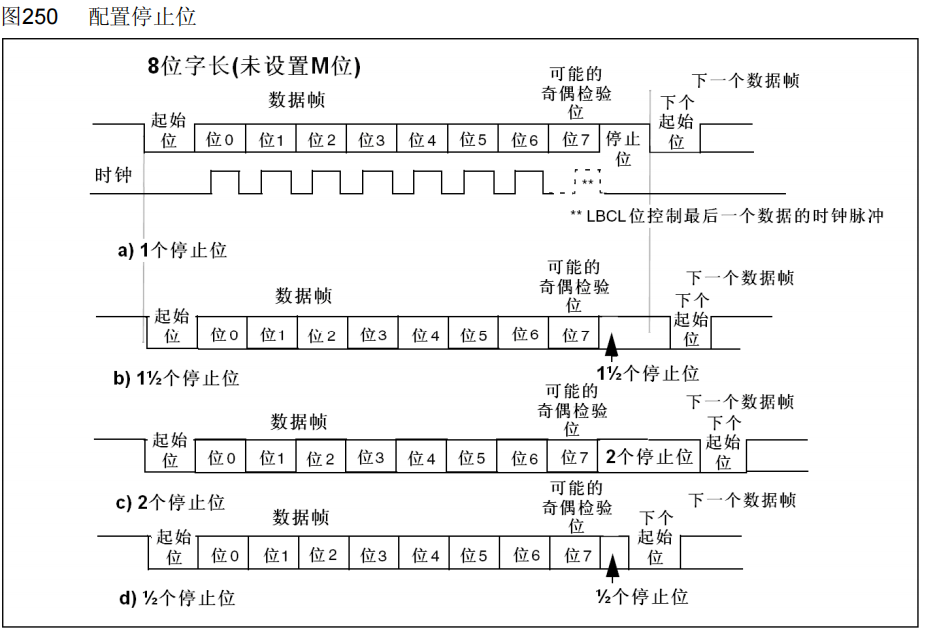 不常用,随便配
不常用,随便配
1.3.3 USART输入数据策略
起始位侦测:数据采样位置对齐正中间
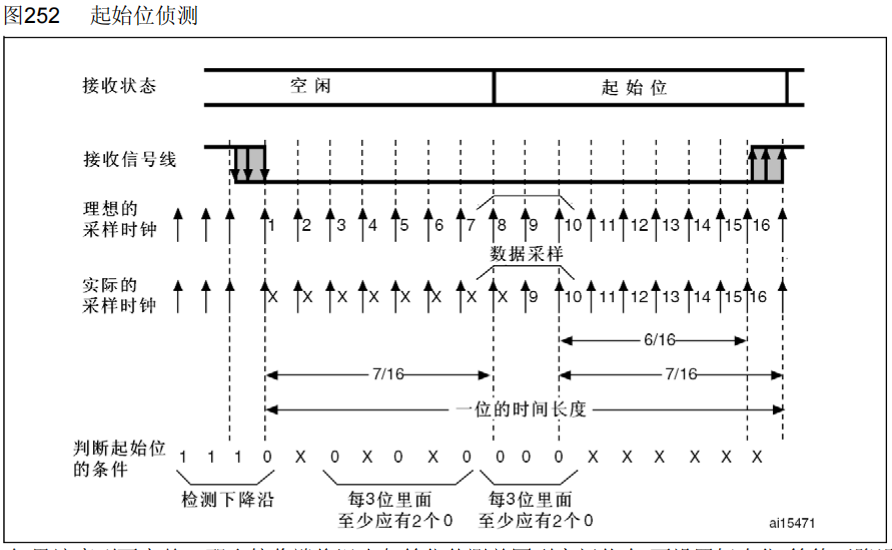
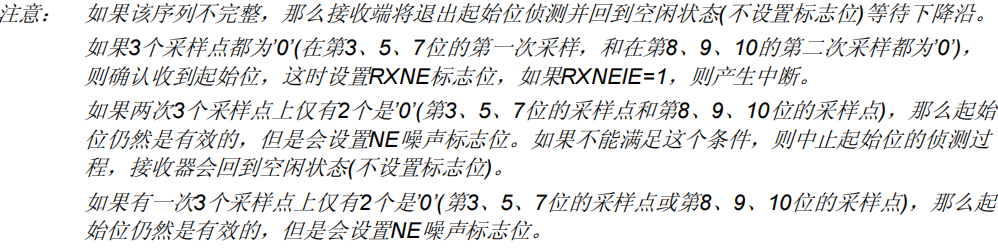
数据采样流程:可以对噪声进行判断,三次采样规则(全一致,采样电平不同,则按次数最多的考虑),但凡有不一致的就置位NE,代表有噪声。
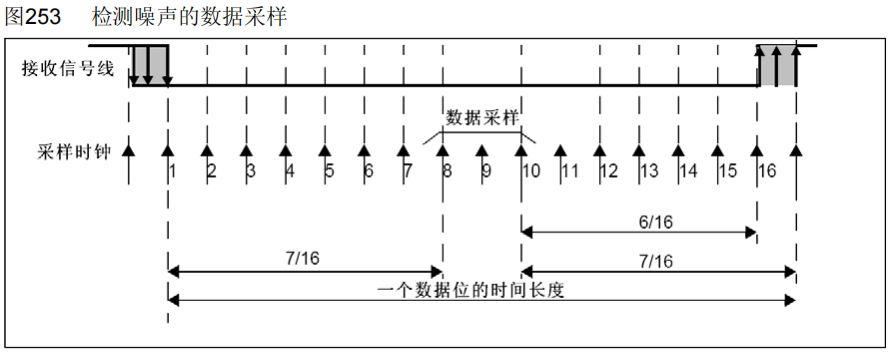
1.3.4 波特率发生器
发送器和接收器的波特率由波特率寄存器BRR里的DIV确定
计算公式:波特率= fPCLkK2/1/(16*DIV)
 自行理解。
自行理解。
1.3.5CH340模块
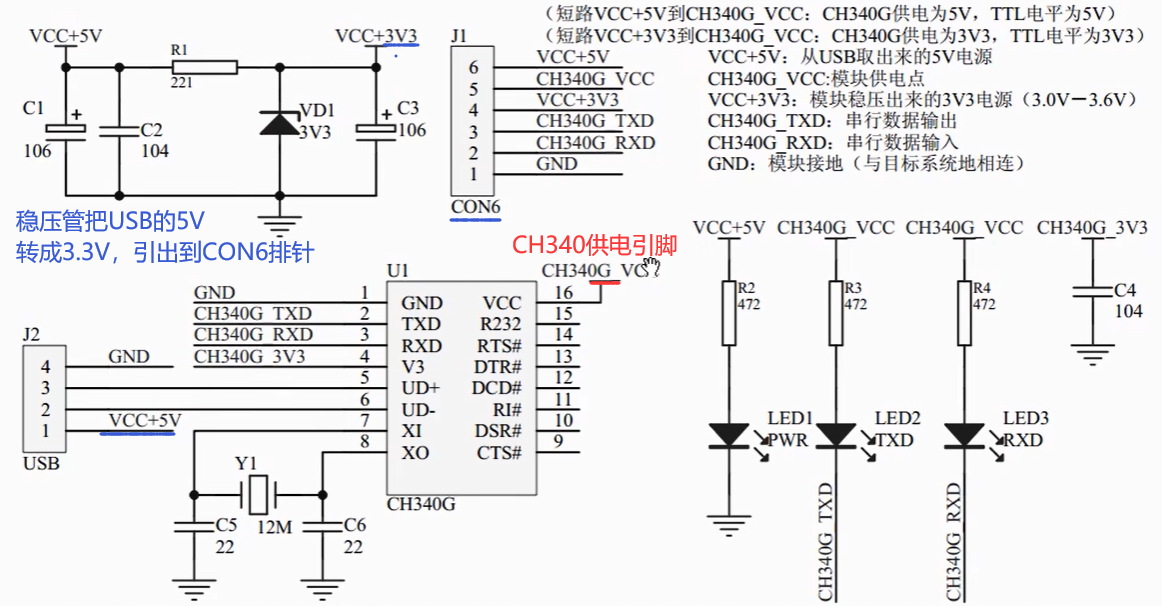
CH340的供电跳线帽最好不要拿掉,拿掉也没事,但只有3.3V供电。通讯电平不一致没啥关系,模块的供电正确就行了。其他是LED指示灯。
【案例】串口发送+接收
① 使能相关时钟:开启 USART1、GPIOA、AFIO 的时钟,USART1 和 GPIOA 属于 APB2 总线:
1
2
3
4
5
| #include "stm32f10x.h"
#include <string.h>
void USART1_Init(void) {
RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1 | RCC_APB2Periph_GPIOA | RCC_APB2Periph_AFIO, ENABLE);
|
② 配置串口 GPIO 引脚:PA9(TX)为复用推挽输出,PA10(RX)为浮空输入:
1
2
3
4
5
6
7
8
9
10
11
| GPIO_InitTypeDef GPIO_InitStructure;
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_9;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStructure);
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_10;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING;
GPIO_Init(GPIOA, &GPIO_InitStructure);
|
③ 初始化 USART1 核心参数:设置波特率 115200、8 位数据、1 位停止位、无校验:
1
2
3
4
5
6
7
8
| USART_InitTypeDef USART_InitStructure;
USART_InitStructure.USART_BaudRate = 115200;
USART_InitStructure.USART_WordLength = USART_WordLength_8b;
USART_InitStructure.USART_StopBits = USART_StopBits_1;
USART_InitStructure.USART_Parity = USART_Parity_No;
USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None;
USART_InitStructure.USART_Mode = USART_Mode_Tx | USART_Mode_Rx;
USART_Init(USART1, &USART_InitStructure);
|
④ 配置串口接收中断:配置 NVIC 优先级,使能 USART1 接收中断:
1
2
3
4
5
6
7
8
9
10
| NVIC_InitTypeDef NVIC_InitStructure;
NVIC_InitStructure.NVIC_IRQChannel = USART1_IRQn;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 1;
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 1;
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;
NVIC_Init(&NVIC_InitStructure);
USART_ITConfig(USART1, USART_IT_RXNE, ENABLE);
USART_Cmd(USART1, ENABLE);
}
|
⑤ 实现串口发送函数:包括单个字节发送和字符串发送:
1
2
3
4
5
6
7
8
9
10
11
12
| void USART1_SendByte(uint8_t byte) {
while (USART_GetFlagStatus(USART1, USART_FLAG_TXE) == RESET);
USART_SendData(USART1, byte);
}
void USART1_SendString(uint8_t *str) {
uint16_t i = 0;
while (str[i] != '\0') {
USART1_SendByte(str[i]);
i++;
}
}
|
⑥ 定义接收缓冲区和标志:用于存储接收数据和标记接收完成:
1
2
3
| uint8_t rx_buf[100];
uint16_t rx_len = 0;
uint8_t rx_flag = 0;
|
⑦ 编写串口中断服务函数:接收数据并判断结束条件:
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
| void USART1_IRQHandler(void) {
if (USART_GetITStatus(USART1, USART_IT_RXNE) != RESET) {
uint8_t data = USART_ReceiveData(USART1);
if (rx_len < 99 && data != '\r') {
rx_buf[rx_len++] = data;
} else {
rx_buf[rx_len] = '\0';
rx_flag = 1;
rx_len = 0;
}
USART_ClearITPendingBit(USART1, USART_IT_RXNE);
}
}
|
⑧ 在 main 函数中使用:发送测试数据,接收并回传数据:
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
| int main(void) {
USART1_Init();
while (1) {
USART1_SendString((uint8_t*)"Hello World!\r\n");
if (rx_flag == 1) {
USART1_SendString((uint8_t*)"Received: ");
USART1_SendString(rx_buf);
USART1_SendString((uint8_t*)"\r\n");
rx_flag = 0;
}
for (uint32_t i = 0; i < 7200000; i++);
}
}
|
1.4 USART串口数据包
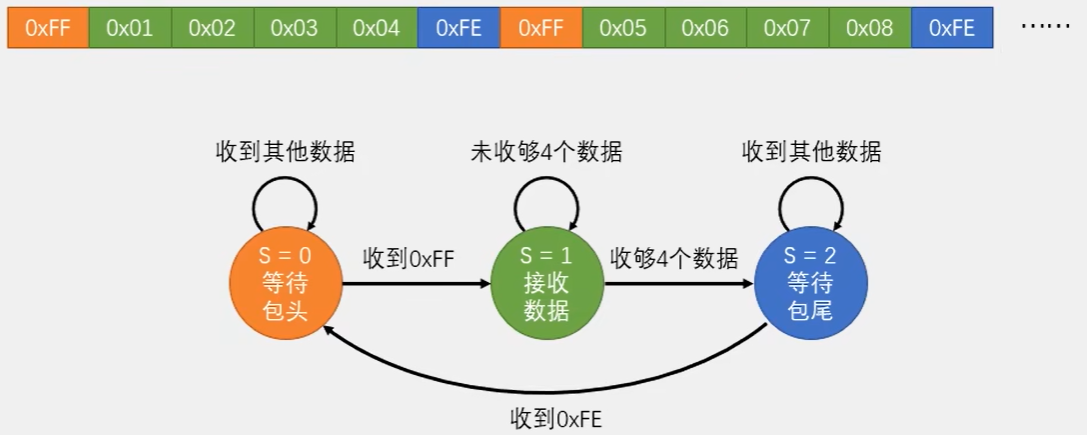
1.4.1 HEX数据包
数据包的作用?
把一个个单独的数据打包起来,方便进行多字节通讯。打包的方式可以是自己设定,也可以是别开发者规定,即自拟通讯协议。根据协议规则(掐包头包尾)在连续不断接收的数据流中提取出需要的数据。

如果数据位和包头包尾****重复怎么办?
基础解决方案:①限制载荷数据的范围,在范围内即为正常数据。②尽量使用固定包长,即规定有效数据长度,对齐后用于接收后判断提取。③增加包头包尾的字节数量,多次判断,好确定是包头。….(工作中还有其他方式,可自行学习)
固定包长和可变包长如何选择?
如果载荷数据会跟包头包尾重复,则固定长度比较合适。不重复就选可变。
1.4.2 文本数据包
说明:HEX数据包本身就是以原始的字节数据本身呈现的字节流,而文本数据包里面,每个字节就多了一层编码和译码,最终呈现出来的就是文本格式。虽然背后还是字节数据,这就存在独特的字符,可以有效避免数据载荷和包头包尾重复的问题。
缺点:解析效率低,需要根据使用场景来使用。


1.4.3 数据包接收
发送比较简单,接收比较复杂,因此复杂内容较值得讨论。接收逻辑通用。
笔者说明:使用状态机用于表示标志位再接受过程中的状态变化,用于判断不同情况,根据这些状态执行不同的操作代码。比如开始接收到一个字节,进入中断,此时状态还没有接收到包头=0,就需要先判断是不是包头,而不判断其他。就这样一个字节一个字节的判断,终于拿到了完整的包头,状态就发生了改变=1,这时候再接收到一个字节,直接就保存接收后面固定长度的内容,
【案例】串口收发HEX数据包
① 使能相关时钟:开启 USART1、GPIOA、AFIO 时钟:
1
2
3
4
5
6
7
| #include "stm32f10x.h"
#include <string.h>
#define HEX_BUF_SIZE 50
void USART1_Init(uint32_t baudrate) {
RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1 | RCC_APB2Periph_GPIOA | RCC_APB2Periph_AFIO, ENABLE);
|
② 配置串口 GPIO:PA9(TX)复用推挽,PA10(RX)浮空输入:
1
2
3
4
5
6
7
8
9
10
11
| GPIO_InitTypeDef GPIO_InitStructure;
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_9;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStructure);
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_10;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING;
GPIO_Init(GPIOA, &GPIO_InitStructure);
|
③ 初始化 USART 参数:设置波特率、无校验、8 位数据:
1
2
3
4
5
6
7
8
| USART_InitTypeDef USART_InitStructure;
USART_InitStructure.USART_BaudRate = baudrate;
USART_InitStructure.USART_WordLength = USART_WordLength_8b;
USART_InitStructure.USART_StopBits = USART_StopBits_1;
USART_InitStructure.USART_Parity = USART_Parity_No;
USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None;
USART_InitStructure.USART_Mode = USART_Mode_Tx | USART_Mode_Rx;
USART_Init(USART1, &USART_InitStructure);
|
④ 配置接收中断:使能 USART1 接收中断及 NVIC:
1
2
3
4
5
6
7
8
9
10
| NVIC_InitTypeDef NVIC_InitStructure;
NVIC_InitStructure.NVIC_IRQChannel = USART1_IRQn;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 1;
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 1;
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;
NVIC_Init(&NVIC_InitStructure);
USART_ITConfig(USART1, USART_IT_RXNE, ENABLE);
USART_Cmd(USART1, ENABLE);
}
|
⑤ 实现 HEX 发送函数:发送单字节 HEX 数据:
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
|
void USART1_SendHexByte(uint8_t hex) {
uint8_t high = (hex >> 4) & 0x0F;
uint8_t low = hex & 0x0F;
high += (high < 10) ? '0' : ('A' - 10);
while (USART_GetFlagStatus(USART1, USART_FLAG_TXE) == RESET);
USART_SendData(USART1, high);
low += (low < 10) ? '0' : ('A' - 10);
while (USART_GetFlagStatus(USART1, USART_FLAG_TXE) == RESET);
USART_SendData(USART1, low);
}
void USART1_SendHexPacket(uint8_t *buf, uint16_t len) {
for (uint16_t i = 0; i < len; i++) {
USART1_SendString((uint8_t*)"0x");
USART1_SendHexByte(buf[i]);
USART1_SendByte(' ');
}
USART1_SendString((uint8_t*)"\r\n");
}
|
⑥ 定义 HEX 接收缓冲区及状态变量:
1
2
3
4
| uint8_t hex_rx_buf[HEX_BUF_SIZE];
uint8_t hex_rx_len = 0;
uint8_t rx_state = 0;
uint8_t temp_hex = 0;
|
⑦ 编写中断服务函数解析 HEX 数据:
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
| void USART1_IRQHandler(void) {
if (USART_GetITStatus(USART1, USART_IT_RXNE) != RESET) {
uint8_t data = USART_ReceiveData(USART1);
uint8_t hex_val;
if (data >= '0' && data <= '9') {
hex_val = data - '0';
} else if (data >= 'A' && data <= 'F') {
hex_val = data - 'A' + 10;
} else if (data >= 'a' && data <= 'f') {
hex_val = data - 'a' + 10;
} else {
rx_state = 0;
USART_ClearITPendingBit(USART1, USART_IT_RXNE);
return;
}
switch (rx_state) {
case 0:
temp_hex = hex_val << 4;
rx_state = 1;
break;
case 1:
temp_hex |= hex_val;
if (hex_rx_len < HEX_BUF_SIZE) {
hex_rx_buf[hex_rx_len++] = temp_hex;
}
rx_state = 0;
break;
}
USART_ClearITPendingBit(USART1, USART_IT_RXNE);
}
}
|
⑧ 主函数中使用:发送测试 HEX 包,接收后回传:
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
| int main(void) {
USART1_Init(115200);
uint8_t test_buf[] = {0x12, 0x34, 0xAB, 0xCD};
USART1_SendString((uint8_t*)"Send: ");
USART1_SendHexPacket(test_buf, 4);
while (1) {
if (hex_rx_len > 0) {
USART1_SendString((uint8_t*)"Received: ");
USART1_SendHexPacket(hex_rx_buf, hex_rx_len);
hex_rx_len = 0;
}
}
}
|
【案例】串口收发文本数据包
① 使能相关时钟:开启 USART1、GPIOA、AFIO 时钟:
1
2
3
4
5
6
7
| #include "stm32f10x.h"
#include <string.h>
#define TEXT_BUF_SIZE 100
void USART1_Init(uint32_t baudrate) {
RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1 | RCC_APB2Periph_GPIOA | RCC_APB2Periph_AFIO, ENABLE);
|
② 配置串口 GPIO:PA9(TX)复用推挽输出,PA10(RX)浮空输入:
1
2
3
4
5
6
7
8
9
10
11
| GPIO_InitTypeDef GPIO_InitStructure;
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_9;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStructure);
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_10;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING;
GPIO_Init(GPIOA, &GPIO_InitStructure);
|
③ 初始化 USART 参数:设置波特率、8 位数据、1 位停止位、无校验:
1
2
3
4
5
6
7
8
| USART_InitTypeDef USART_InitStructure;
USART_InitStructure.USART_BaudRate = baudrate;
USART_InitStructure.USART_WordLength = USART_WordLength_8b;
USART_InitStructure.USART_StopBits = USART_StopBits_1;
USART_InitStructure.USART_Parity = USART_Parity_No;
USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None;
USART_InitStructure.USART_Mode = USART_Mode_Tx | USART_Mode_Rx;
USART_Init(USART1, &USART_InitStructure);
|
④ 配置接收中断:使能 USART1 接收中断及 NVIC:
1
2
3
4
5
6
7
8
9
10
| NVIC_InitTypeDef NVIC_InitStructure;
NVIC_InitStructure.NVIC_IRQChannel = USART1_IRQn;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 1;
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 1;
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;
NVIC_Init(&NVIC_InitStructure);
USART_ITConfig(USART1, USART_IT_RXNE, ENABLE);
USART_Cmd(USART1, ENABLE);
}
|
⑤ 实现文本发送函数:发送字符串(以 ‘\0’ 结尾):
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
|
void USART1_SendChar(char c) {
while (USART_GetFlagStatus(USART1, USART_FLAG_TXE) == RESET);
USART_SendData(USART1, (uint8_t)c);
}
void USART1_SendText(const char *text) {
while (*text != '\0') {
USART1_SendChar(*text++);
}
}
void USART1_SendTextPacket(const char *packet) {
USART1_SendText(packet);
USART1_SendText("\r\n");
}
|
⑥ 定义文本接收缓冲区及标志:
1
2
3
| char text_rx_buf[TEXT_BUF_SIZE];
uint16_t text_rx_len = 0;
uint8_t text_rx_complete = 0;
|
⑦ 编写中断服务函数接收文本:
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
| void USART1_IRQHandler(void) {
if (USART_GetITStatus(USART1, USART_IT_RXNE) != RESET) {
char data = (char)USART_ReceiveData(USART1);
if (data == '\n' || data == '\r') {
if (text_rx_len > 0) {
text_rx_buf[text_rx_len] = '\0';
text_rx_complete = 1;
text_rx_len = 0;
}
} else {
if (text_rx_len < TEXT_BUF_SIZE - 1) {
text_rx_buf[text_rx_len++] = data;
}
}
USART_ClearITPendingBit(USART1, USART_IT_RXNE);
}
}
|
⑧ 主函数中使用:发送文本包,接收后回传:
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
| int main(void) {
USART1_Init(115200);
USART1_SendTextPacket("STM32 Serial Text Test");
while (1) {
if (text_rx_complete) {
USART1_SendText("Received: ");
USART1_SendTextPacket(text_rx_buf);
text_rx_complete = 0;
}
}
}
|
二、I2C通讯
2.1 简介
- I2C总线(InterIC BUS)是由Philips公司开发的一种通用数据总线
- 两根通信线:SCL(SerialClock)、SDA(Serial Data)
- 同步,半双工
- 带数据应答
- 支持总线挂载多设备(一主多从、多主多从)
串口有USART硬件电路支持,异步通讯才比较稳定,但是软件模拟比较复杂。I2C因为是同步协议,软件模拟起来非常容易。使用同步时序就可以极大地降低单片机对硬件电路的依赖。即使没有硬件,也可以通过软件的引脚反转电平来实现时钟控制。而单片机去干别的事情的事就可以中断时钟线,这样设备也会停止接收,减少数据错误的可能。
异步通信就是省一根时钟线,对时间要求严格,对硬件电路的依赖比较严重。同步通讯则相反。
本教程主要任务:通过数据线,实现单片机外挂设备的控制功能,即实现读写外挂模块的寄存器。至少实现在指定位置写寄存器。
一般使用一主多从的模式:类似一个老师讲课,很多学生听课,学生只能被老师点名后才可以发言。
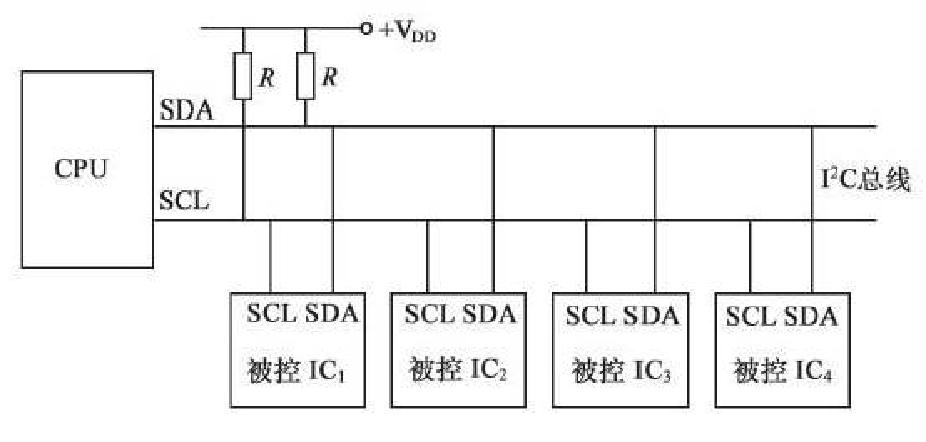
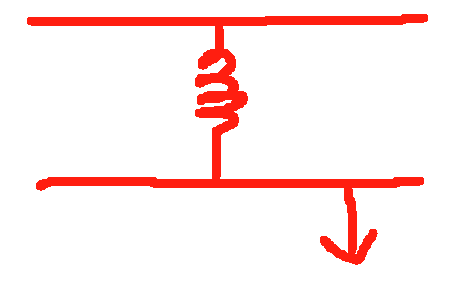
2.2 硬件电路
- 所有I2C设备的SCL连在一起,SDA连在一起
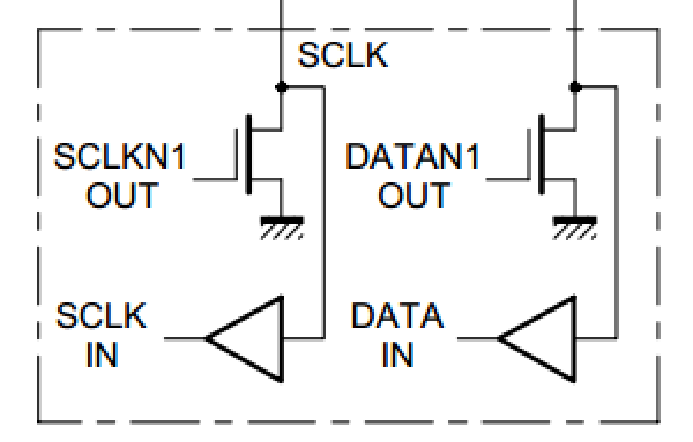
- 设备的SCL和SDA均要配置成开漏输出模式
- SCL和SDA各添加一个上拉电阻,阻值一般为4.7K左右
主机对SCL线具有完全控制功能,空闲时候主机控制SDA,只有从机发送数据或从机应答的时候,主机才会转交SDA的控制权给从机。
为了防止电平没协调好而起冲突,****I2C设计禁止了所有设备输出强上拉的高电平,采用外置弱上拉电阻加开漏输出的电路结构
即只允许向下拉或者松手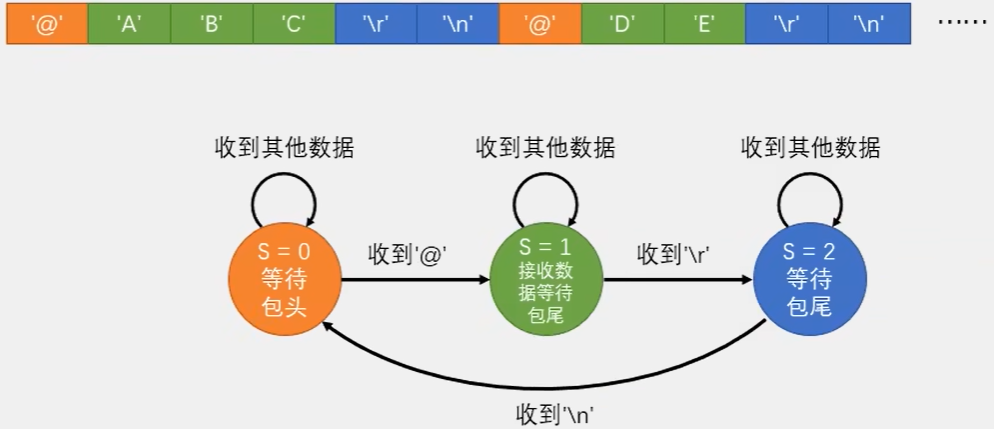 ,有电阻弹簧会自动拉高(弱上拉)。
,有电阻弹簧会自动拉高(弱上拉)。
【好处】:
①完全杜绝了电源短路现象,保证电路的安全,防止同时被强拉或推的状态,即使多个根下拉杆子也没有问题。
②避免了引脚模式的频繁切换,开漏加弱上拉的模式,同时兼具了输入和输出的功能。想输出就拉杆子放手,操作杆子变化,观察即可得到电平。因为开漏模式下,输出高电平就相当于断开引脚,所有在输入之前,可以直接输出高电平,不需要切换成输入模式。
③模式会有一个线与的现象,只要有任意一个或多个设备输出了低电平,总线就处于低电平;所有设备输出高电平(放手)才处于高电平。I2C可以利用电路特征,执行多主机模式下的时钟同步和总线仲裁。
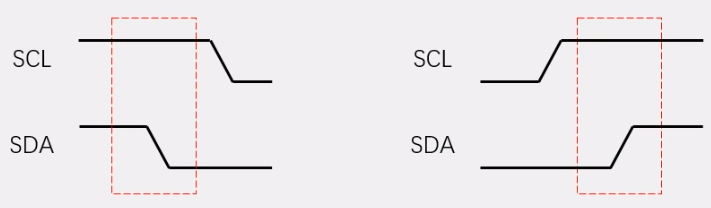
2.3 I2C时序基本单元
- 起始条件:SCL高电平期间,SDA从高电平切换到低电平
- 终止条件:SCL高电平期间,SDA从低电平切换到高电平
 起始和终止条件都是由主机产生的,所有在总线空闲状态时,从机必须始终双手放开,不允许碰(如果触碰了就是多主机模式了)。
起始和终止条件都是由主机产生的,所有在总线空闲状态时,从机必须始终双手放开,不允许碰(如果触碰了就是多主机模式了)。
- 发送一个字节:SCL低电平期间,主机将数据位依次放到SDA线上(高位先行),然后释放SCL,从机将在SCL高电平期间读取数据位所以SCL高电平期间SDA不允许有数据变化,依次循环上述过程8次即可发送一个字节
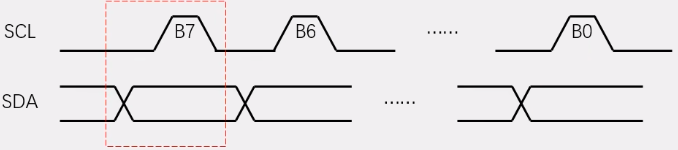 一般上升沿时刻从机就已经读取完了。
一般上升沿时刻从机就已经读取完了。
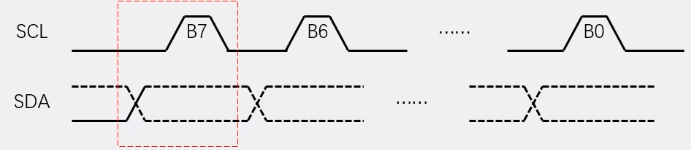
- 接收一个字节:SCL低电平期间,从机将数据位依次放到SDA线上(高位先行),然后释放SCL,主机将在SCL高电平期间读取数据位所以SCL高电平期间SDA不允许有数据变化,依次循环上述过程8次即可接收一个字节(主机在接收之前,需要释放SDA,让发送从机控制)
 从机的数据变换贴着SCL下降沿,因为接受到SCL上升沿后需要响应时间。
从机的数据变换贴着SCL下降沿,因为接受到SCL上升沿后需要响应时间。
- 发送应答:主机在接收完一个字节之后,在下一个时钟发送一位数据,数据0表示应答,数据1表示非应答
- 接收应答:主机在发送完一个字节之后,在下一个时钟接收一位数据,判断从机是否应答,数据0表示应答,数据1表示非应答(主机在接收之前,需要释放SDA)
2.4 I2C时序
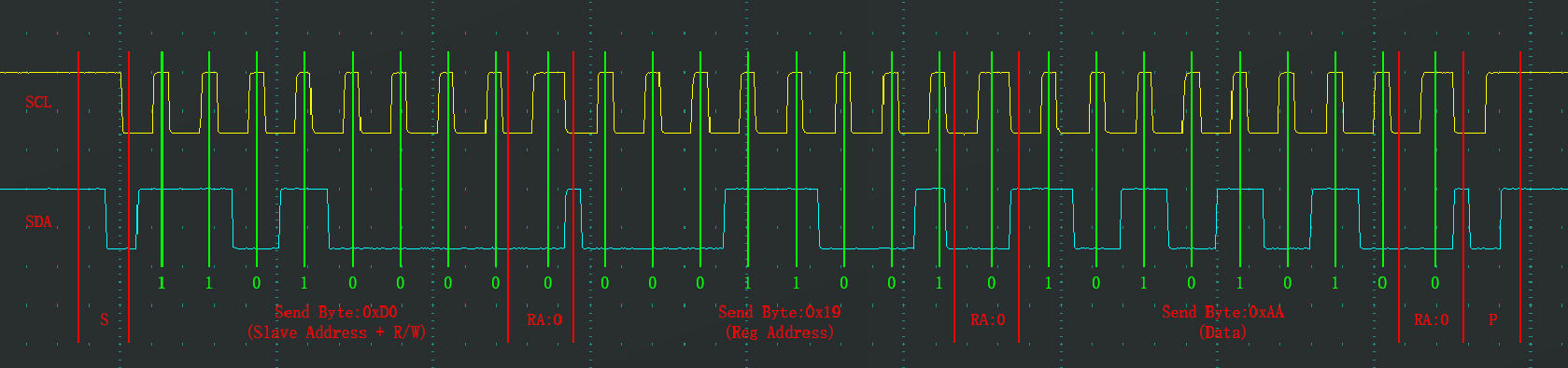
2.4.1 指定地址写
【过程说明】主机要确定访问的设备,就需要把每个从机都确定一个唯一的设备地址,从机设备地址就是名字。而主机发送前会叫一下这个名字,所有从机都会收到,但只有匹配的从机才进行响应读写操作。
【从机设备地址】在I2C标准里分为7位和10位地址,教程讲7位,因为比较简单和应用范围广。在每个设备出厂时候就会会被分配一个地址。具体可以在芯片手册里找到。相同型号的地址一般都是一样的地址。如果多个相同型号都挂在总线上。就需要用到地址中的可变部分来进行区分。
- 对于指定设备(Slave Address),在指定地址(Reg Address)下,写入指定数据(Data)
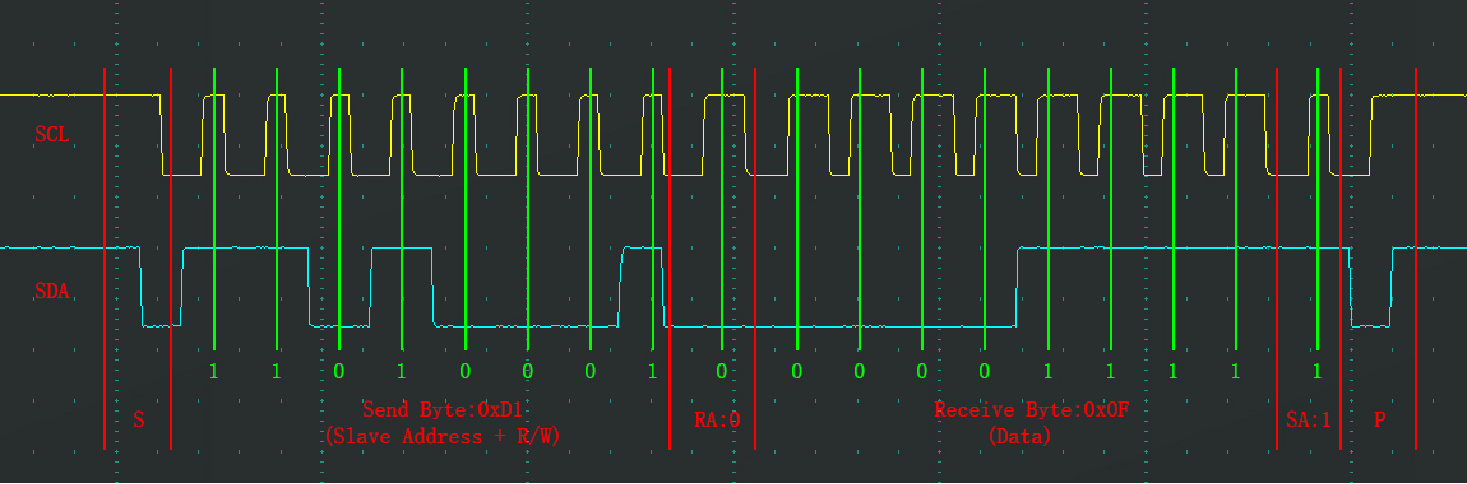
2.4.2 当前地址读
- 对于指定设备(Slave Address),在当前地址指针指示的地址下,读取从机数据(Data)
此时传输数据并没有指定写入从机的寄存器地址,因此需要用到地址指针。会自动增加地址写入。
2.4.3 指定地址读
对于指定设备(Slave Address),在指定地址(Reg Address)下,读取从机数据(Data)
需要在指定地址写的从机地址时序部分后+当前地址读的时序,从而得到。

如果想发多个数据,只需要将数据部分重复即可,即在指定地址输入后,写入多个字节,地址会自增。注意这时候主机如果想要结束数据,就需要在最后一个数据结束后加上非应答,否则会让从机认为主机还需要数据,从机继续发生下一个数据,从而占据SDA,主机想产生停止条件就不能正常回答高电平了。
2.5 I2C外设简介
- STM32内部集成了硬件I2C收发电路,可以由硬件自动执行时钟生成、起始终止条件生成、应答位收发、数据收发等功能,减轻CPU的负担
- 支持多主机模型
- 支持7位/10位地址模式
- 支持不同的通讯速度,标准速度(高达100 kHz),快速(高达400 kHz)
- 支持DMA
- 兼容SMBus(System Managerment Bus主要用于电源管理系统)协议
- STM32F103C8T6 硬件I2C资源(硬件I2C受限于资源):I2C1、I2C2
软件模拟I2C是非常常见的,但是作为一个协议标准,I2C通讯也是可以有硬件收发电路的。如果是简单应用,那么软件模拟会比较灵活,如果要求性能指标要求比较高,就考虑硬件I2C。本小结讲硬件STM32内部的I2C外设。
多主机模式下,两个主机同时通讯占用总线就要发起总线仲裁。可变多主机模式,所有设备一视同仁,谁想当主机谁就站出来。
关于I2C地址,可以通过修改低位可变地址部分来避免地址冲突,也可以另外再开辟I2C总线,比较容易解决。而STM32支持10位地址,1024种可能。在实现中,剩下的5位地址会用作标志位。
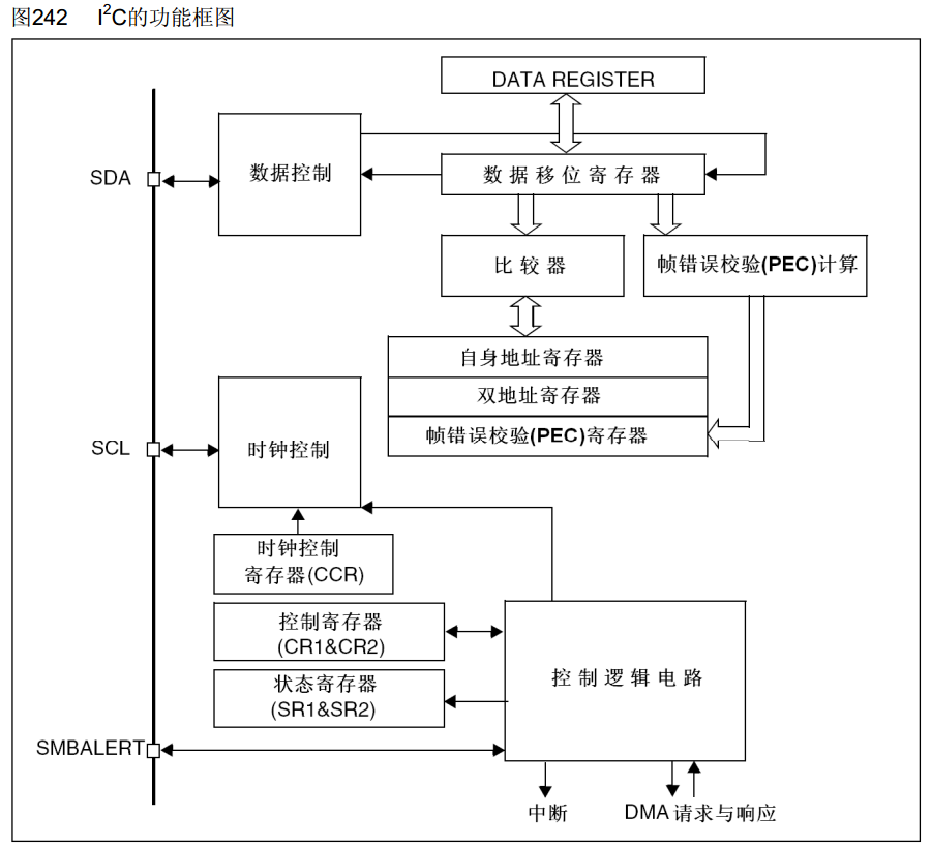
2.6 I2C框图
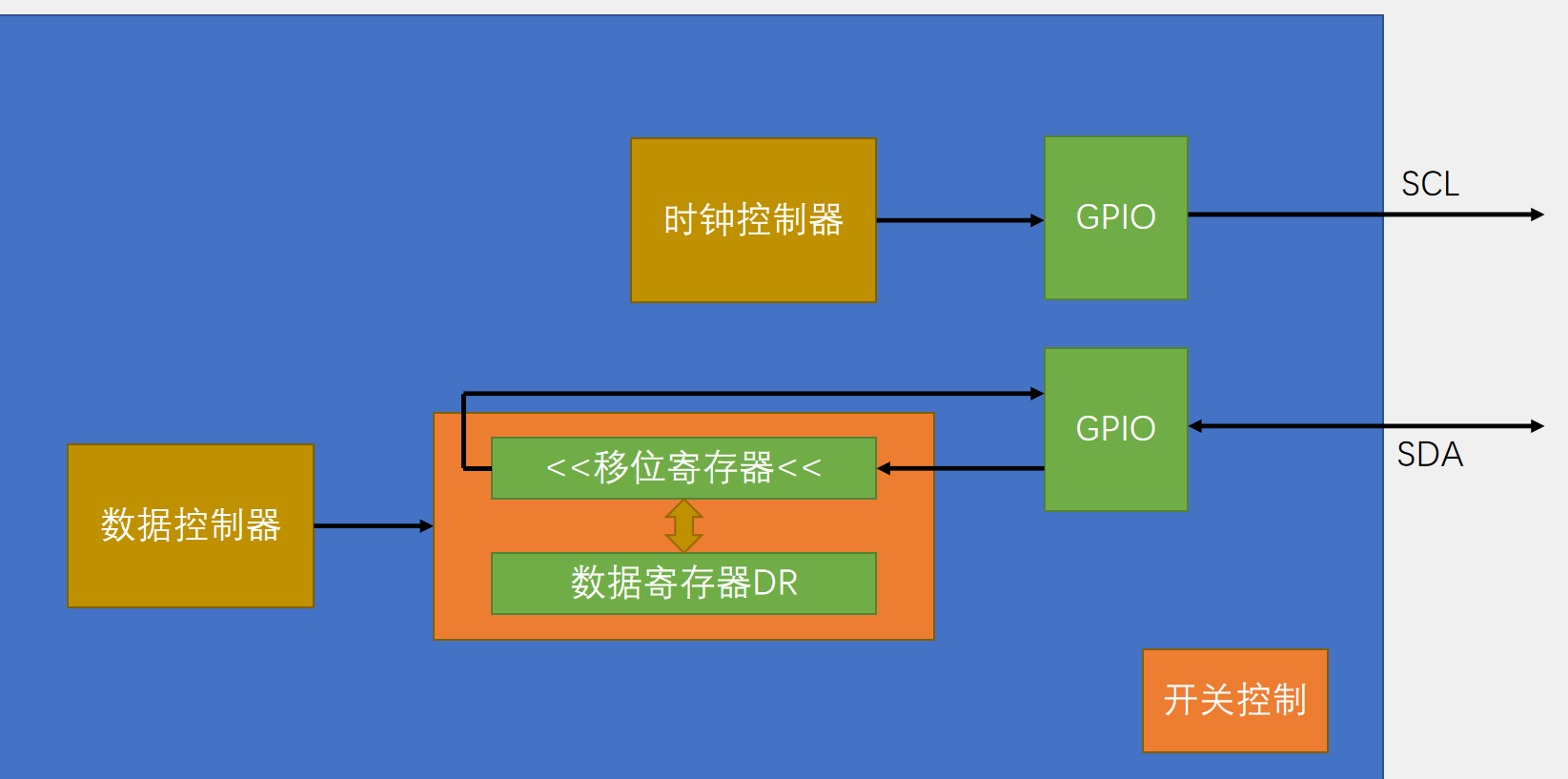
核心部分是数据寄存器和移位寄存器:
- 当我们需要发送数据时,可以把一个字节数据写到数据寄存器DR,这个数据寄存器的值就会进一步转到移位寄存器里,在移位的过程中,就可以把下一个数据放到数据寄存器里等着了,一但前一个数据移位完成,下一个数据就可以无缝衔接,继续发送。其中数据寄存器转到移位寄存器时候,就会置状态寄存器的TXE位为1,表示发送数据寄存器为空。
- 当我们需要接收时候,也是输入的数据一位一位的,从引脚移入到移位寄存器里,当一个字数据具收齐后,数据整体从移位寄存器转移到数据寄存器,同时置标志位RXNE,表示接收数据寄存器非空。这时候就可以把数据读出来了。
略。
2.7 I2C基本结构
 略。
略。
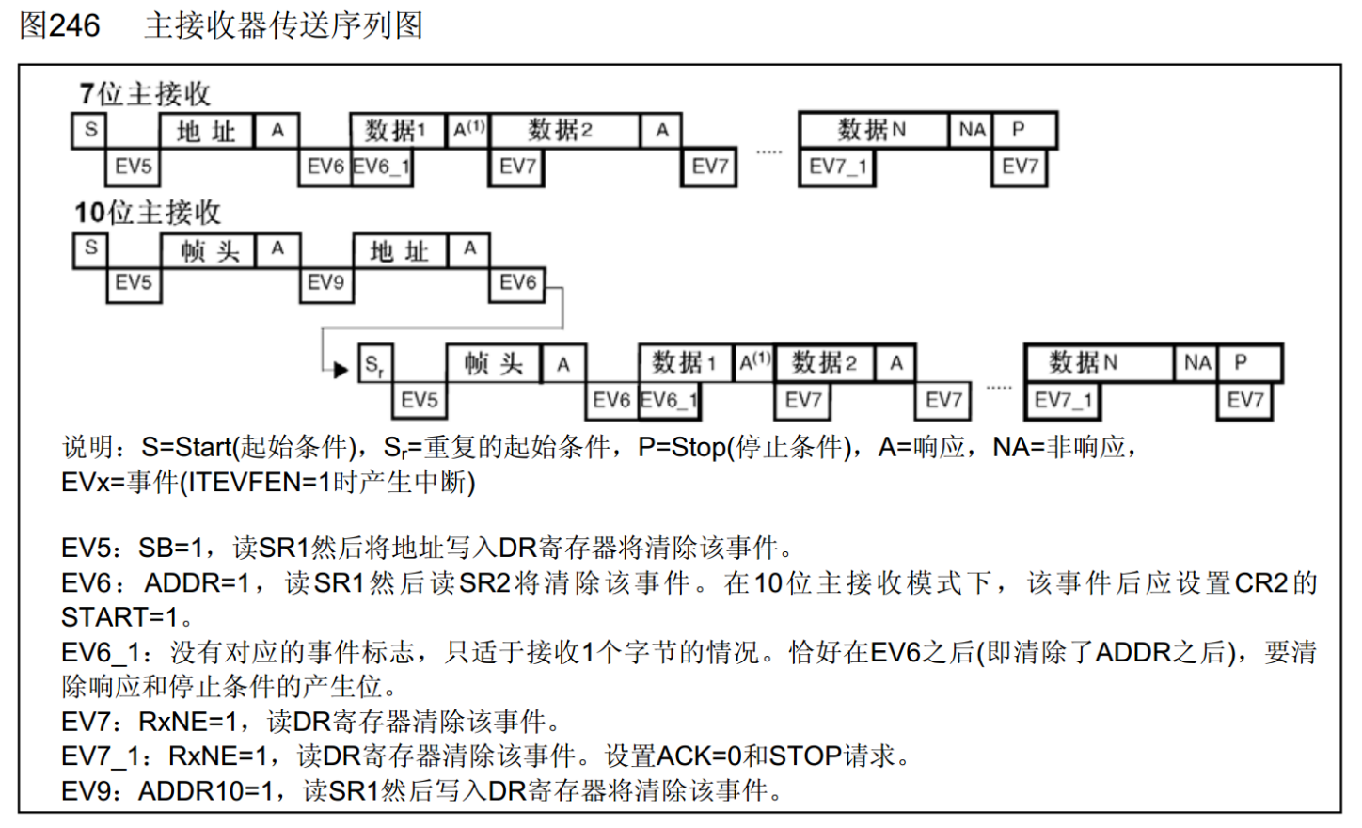
2.8 硬件I2C操作流程
参考序列图,才知道程序什么时候该做什么事情。手册给出了从机发送接收、主机发送接收,四个图,教程只关注主机发送和接收部分。
2.8.1 主机发送
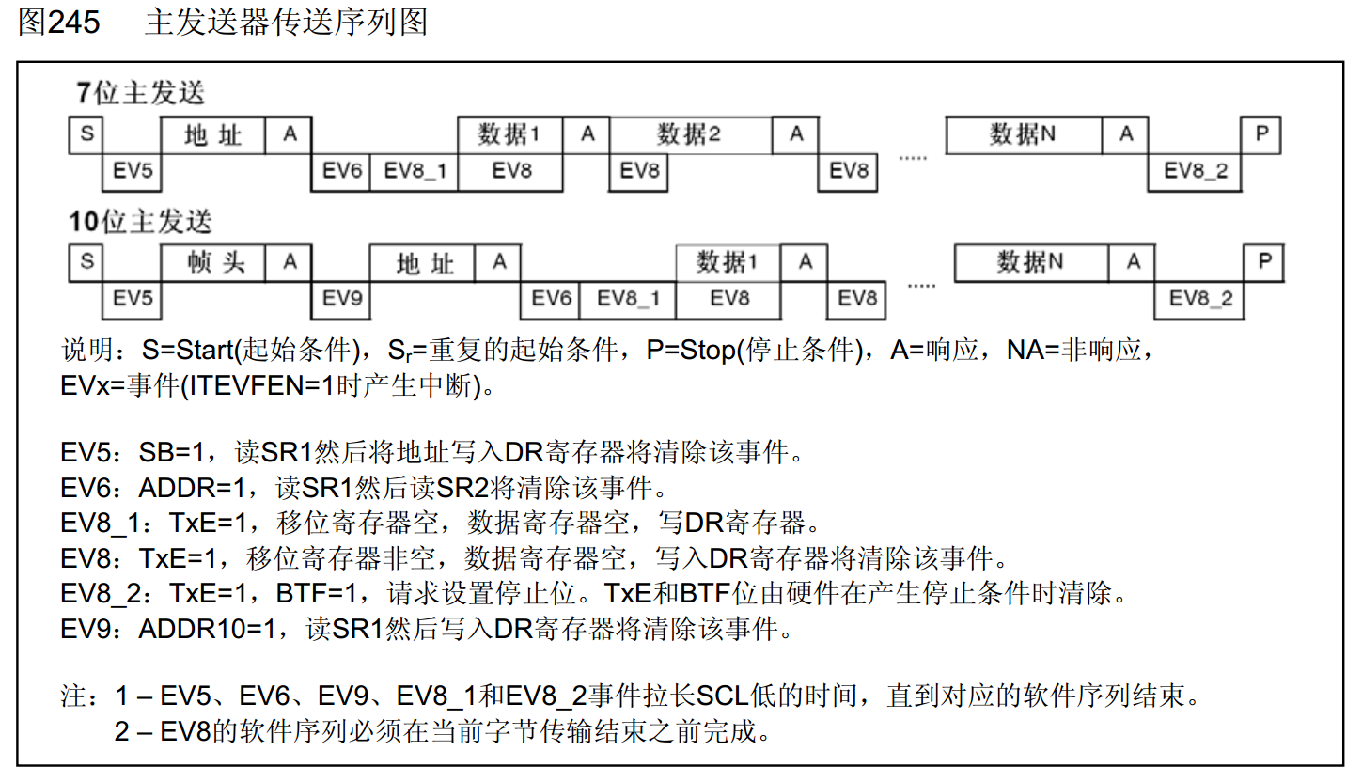
7位地址起始条件后的一个字节是寻址,10位地址起始条件后的两个字节都是寻址。后续的数据可以由厂商规定。
STM32默认从模式,将硬件标志位置位,会因此转成主模式,表示有数据要发。之后软件检查EV5标志位(EVx标志位是组合了多个标志位的大标志位),看硬件是否都达到了想要的状态。
结合基本结构框图进行观看。
2.8.2 主机接收

2.9 软硬件波形对比

不标准的波形也不影响通讯。
手册,略。
【案例】硬件I2C读写
① 使能相关时钟:开启 I2C1、GPIO(连接 SCL 和 SDA)时钟,I2C1 属于 APB1 总线,GPIOB 属于 APB2 总线:
1
2
3
4
5
6
7
8
9
| #include "stm32f10x.h"
#define I2C_SCL_PIN GPIO_Pin_6
#define I2C_SDA_PIN GPIO_Pin_7
#define I2Cx I2C1
void I2C_Config(void) {
RCC_APB1PeriphClockCmd(RCC_APB1Periph_I2C1, ENABLE);
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB | RCC_APB2Periph_AFIO, ENABLE);
|
② 配置 I2C GPIO 引脚:SCL 和 SDA 需配置为复用开漏输出(I2C 总线要求):
1
2
3
4
5
| GPIO_InitTypeDef GPIO_InitStructure;
GPIO_InitStructure.GPIO_Pin = I2C_SCL_PIN | I2C_SDA_PIN;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_OD;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOB, &GPIO_InitStructure);
|
③ 初始化 I2C 参数:设置时钟频率(如 100kHz 标准模式)、地址模式等:
1
2
3
4
5
6
7
8
9
10
| I2C_InitTypeDef I2C_InitStructure;
I2C_InitStructure.I2C_Mode = I2C_Mode_I2C;
I2C_InitStructure.I2C_DutyCycle = I2C_DutyCycle_2;
I2C_InitStructure.I2C_OwnAddress1 = 0x00;
I2C_InitStructure.I2C_Ack = I2C_Ack_Enable;
I2C_InitStructure.I2C_AcknowledgedAddress = I2C_AcknowledgedAddress_7bit;
I2C_InitStructure.I2C_ClockSpeed = 100000;
I2C_Init(I2Cx, &I2C_InitStructure);
I2C_Cmd(I2Cx, ENABLE);
|
④ 实现 I2C 起始信号函数:
1
2
3
4
5
6
7
|
uint8_t I2C_Start(void) {
I2C_GenerateSTART(I2Cx, ENABLE);
while (!I2C_CheckEvent(I2Cx, I2C_EVENT_MASTER_MODE_SELECT));
return 0;
}
|
⑤ 实现 I2C 发送设备地址函数(含读写位):
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
|
uint8_t I2C_SendAddr(uint8_t addr, uint8_t read) {
addr <<= 1;
if (read) addr |= 0x01;
else addr &= ~0x01;
I2C_Send7bitAddress(I2Cx, addr, (read ? I2C_Direction_Receiver : I2C_Direction_Transmitter));
if (read) {
while (!I2C_CheckEvent(I2Cx, I2C_EVENT_MASTER_RECEIVER_MODE_SELECTED));
} else {
while (!I2C_CheckEvent(I2Cx, I2C_EVENT_MASTER_TRANSMITTER_MODE_SELECTED));
}
return 0;
}
|
⑥ 实现 I2C 发送数据函数:
1
2
3
4
5
6
7
|
uint8_t I2C_SendData(uint8_t data) {
I2C_SendData(I2Cx, data);
while (!I2C_CheckEvent(I2Cx, I2C_EVENT_MASTER_BYTE_TRANSMITTED));
return 0;
}
|
⑦ 实现 I2C 接收数据函数(带应答控制):
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
|
uint8_t I2C_ReceiveData(uint8_t last) {
if (last) {
I2C_AcknowledgeConfig(I2Cx, DISABLE);
I2C_NACKPositionConfig(I2Cx, I2C_NACKPosition_Current);
}
while (!I2C_CheckEvent(I2Cx, I2C_EVENT_MASTER_BYTE_RECEIVED));
uint8_t data = I2C_ReceiveData(I2Cx);
if (last) {
I2C_AcknowledgeConfig(I2Cx, ENABLE);
}
return data;
}
|
⑧ 实现 I2C 停止信号函数:
1
2
3
| void I2C_Stop(void) {
I2C_GenerateSTOP(I2Cx, ENABLE);
}
|
⑨ 封装 I2C 写设备寄存器函数:
1
2
3
4
5
6
7
8
9
|
uint8_t I2C_WriteReg(uint8_t addr, uint8_t reg, uint8_t data) {
I2C_Start();
I2C_SendAddr(addr, 0);
I2C_SendData(reg);
I2C_SendData(data);
I2C_Stop();
return 0;
}
|
⑩ 封装 I2C 读设备寄存器函数:
1
2
3
4
5
6
7
8
9
10
11
12
13
|
uint8_t I2C_ReadReg(uint8_t addr, uint8_t reg) {
uint8_t data;
I2C_Start();
I2C_SendAddr(addr, 0);
I2C_SendData(reg);
I2C_Start();
I2C_SendAddr(addr, 1);
data = I2C_ReceiveData(1);
I2C_Stop();
return data;
}
|
⑪ 主函数中使用示例(读写某 I2C 设备寄存器):
1
2
3
4
5
6
7
8
9
10
11
12
13
| int main(void) {
I2C_Config();
I2C_WriteReg(0x48, 0x00, 0x55);
uint8_t val = I2C_ReadReg(0x48, 0x00);
while (1) {
}
}
|
三、SPI通讯
3.1 简介
- SPI(Serial Peripheral Interface)是由Motorola公司开发的一种通用数据总线
- 四根通信线:SCK(Serial Clock)、MOSI(Master Output Slave Input)、MISO(Master Input Slave Output)、SS(Slave Select)。名称会有不同,注意对照芯片手册即可。
- 同步,全双工
- 支持总线挂载多设备(仅一主多从),会有多根SS线
比较之前学习的I2C还是比较复杂的,地址限制下多设备都只需要两根线。但是其通讯线高电平驱动能力比较弱,这会导致上升沿的过程耗时长,限制通讯速度100、400KHz。相对于I2C,SPI的优缺点:
①SPI协议并没有严格规定最大传输速度,其取决于芯片厂商需求。
②SPI比较简单,没有I2C那么多功能。
③全双工,SPI硬件开销大,通讯过程中经常会有资源库浪费现象。有钱!就是要快速。
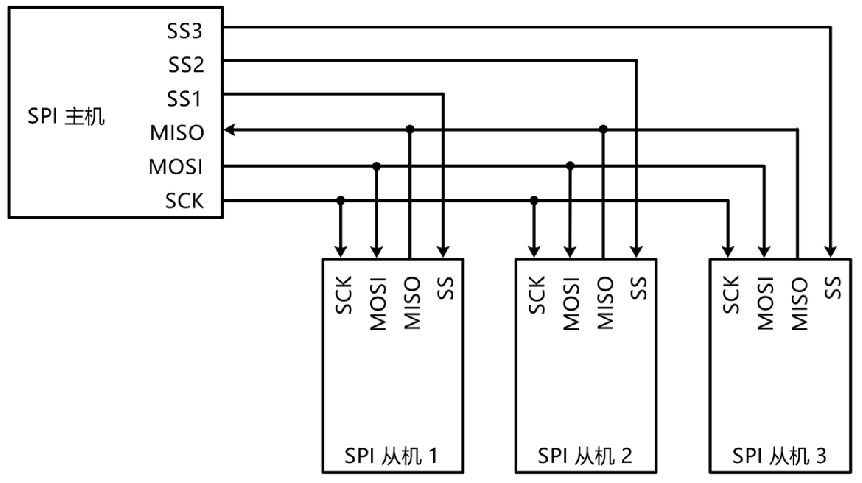
3.2 硬件电路
所有SPI设备的SCK、MOSI、MISO分别连在一起
SCK:时钟线完全由主机掌控,主机输出,从机输入。
MOSI:主机输出,从机输入
MISO:主机输入(看图中箭头),从机输出
主机另外引出多条SS控制线,分别接到各从机的SS引脚
输出引脚配置为推挽输出,输入引脚配置为浮空或上拉输入
SPI的输入输出引脚是固定的,基本不会出现冲突,因此可以使用推挽输出。但SPI仍有可能在MISO线上多个从机推挽输出造成冲突,因此SPI规定从机未被选中时候的MISO引脚必须为高阻态,当然写主机程序不需要关注从机这个问题。
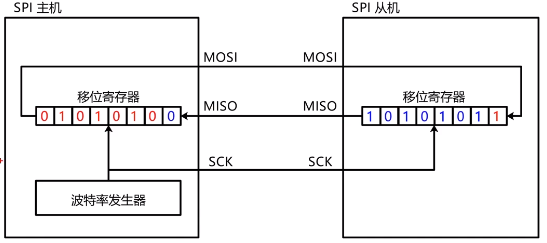
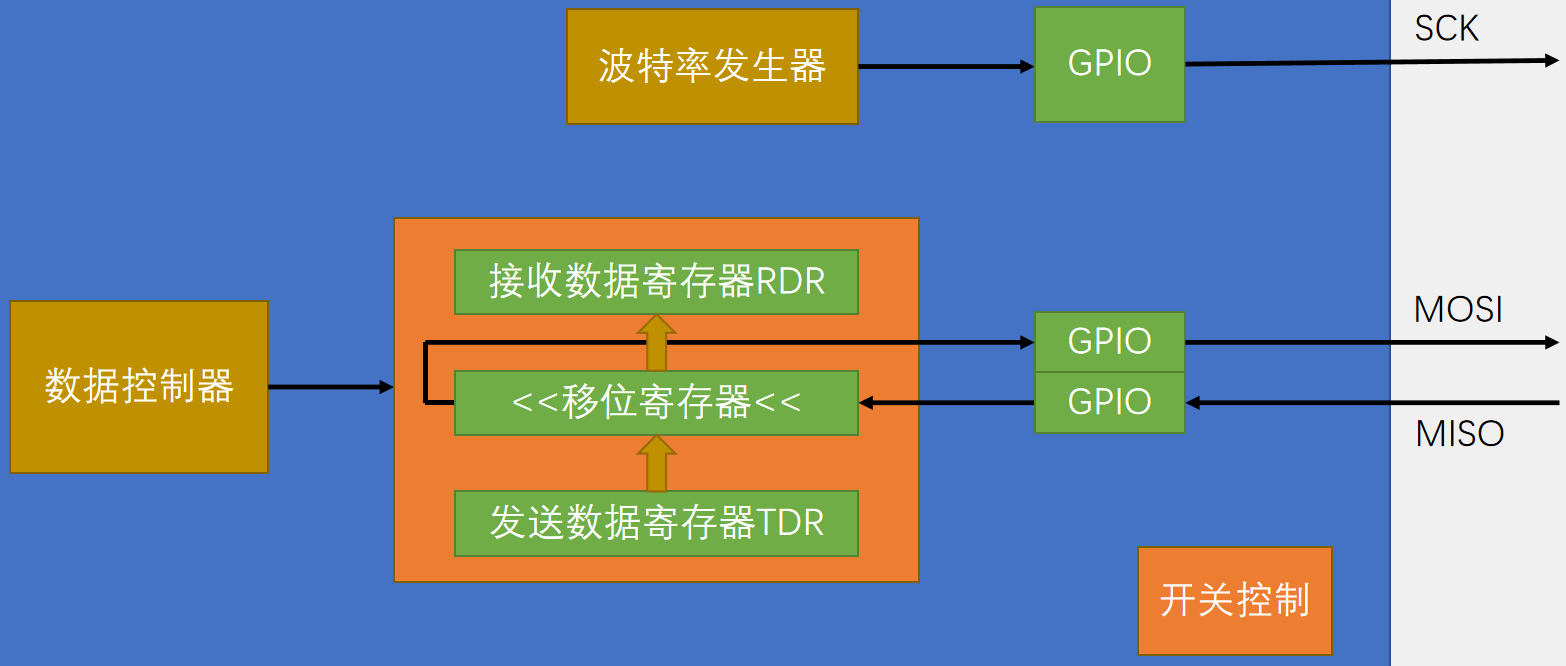
3.3 移位示意图
移位寄存器随着SCK的频率触发移位,会将箭头方向移出去的一位放到引脚上。在SCK频率触发的间隔,主机和从机都进行数据采集,获取移除位所在的引脚的电平存放到各自箭头方向连接的寄存器上。
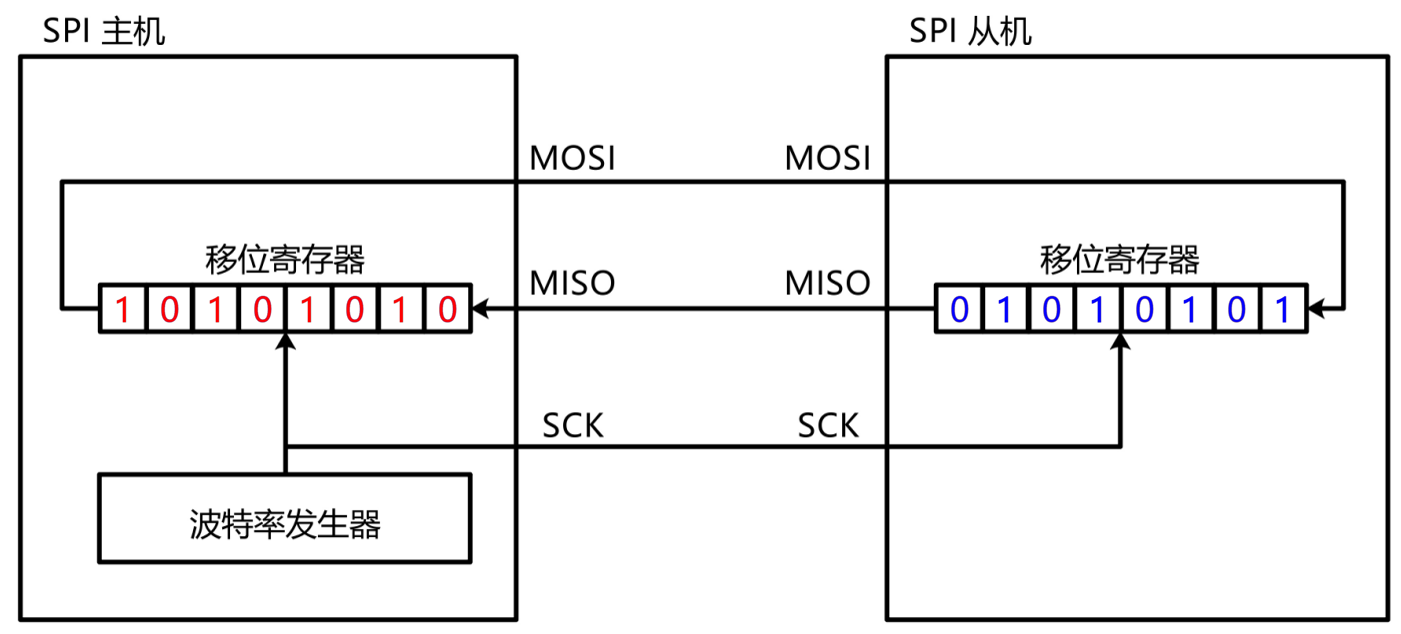
多次后就完成了一个字节的数据交换。只收或只发的情况下,只需要忽略掉发送或者接收信号即可。
3.4 SPI时序基本单元
- 起始条件:SS从高电平切换到低电平
- 终止条件:SS从低电平切换到高电平

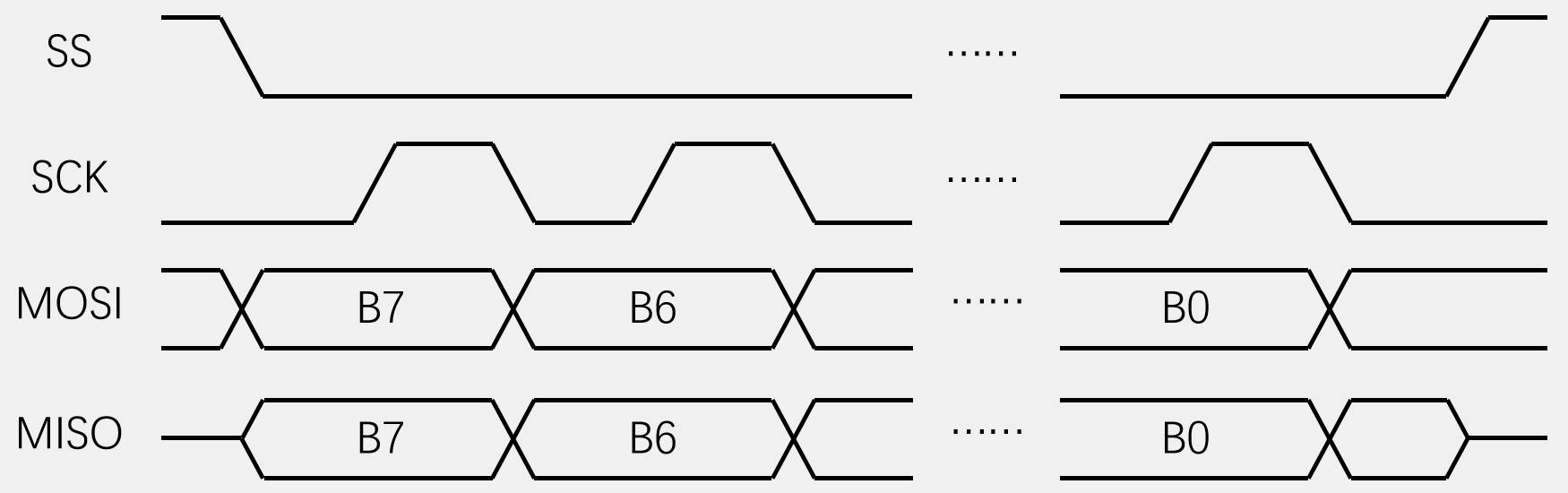
交换数据过程,SPI并没偶有规定在SCK的什么时候进行移位,给了开发者配置的选择,兼容更多芯片。有两个可以配置的位,提高协议兼容性,产生了如下四种模式:****模式虽然多,功能相似,只学习一种即可。
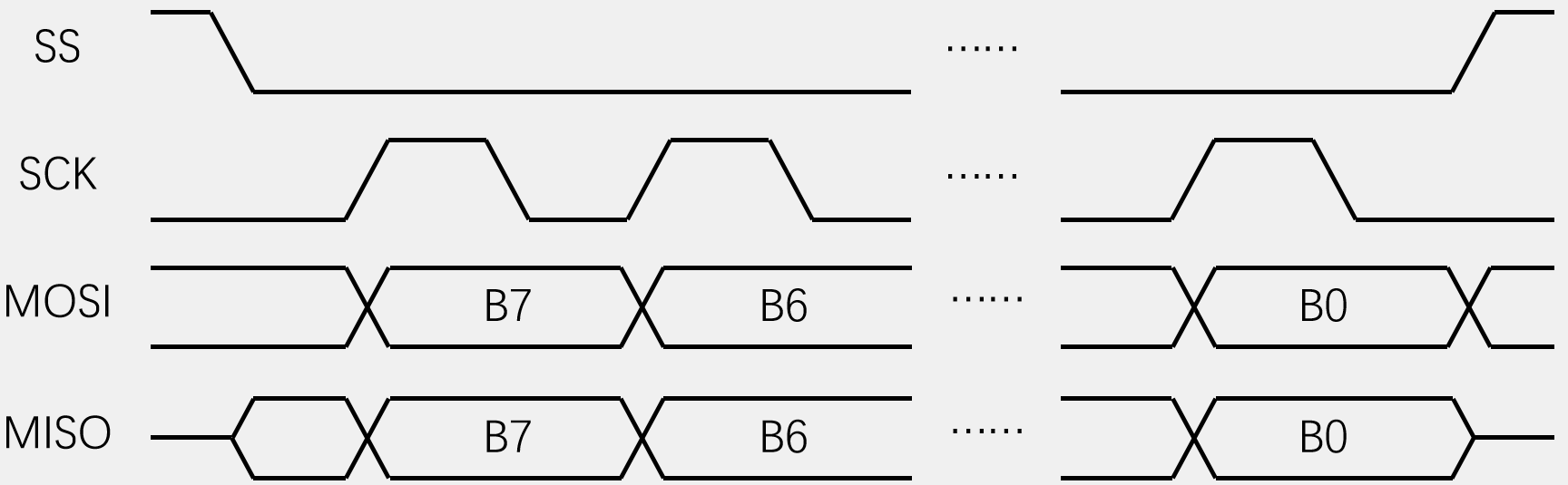
【交换一个字节(模式0)】
- (时钟极性)CPOL=0:空闲状态时,SCK为低电平
- (时钟相位)CPHA=0:SCK第一个边沿移入数据,第二个边沿移出数据
 MISO不发送数据时候为高阻态(中间线),只要SS不置高,可以一致重复交换数据。
MISO不发送数据时候为高阻态(中间线),只要SS不置高,可以一致重复交换数据。
【交换一个字节(模式1)】****(常用、高速)
- CPOL=0:空闲状态时,SCK为低电平
- CPHA=1:SCK第一个边沿移出数据,第二个边沿移入数据
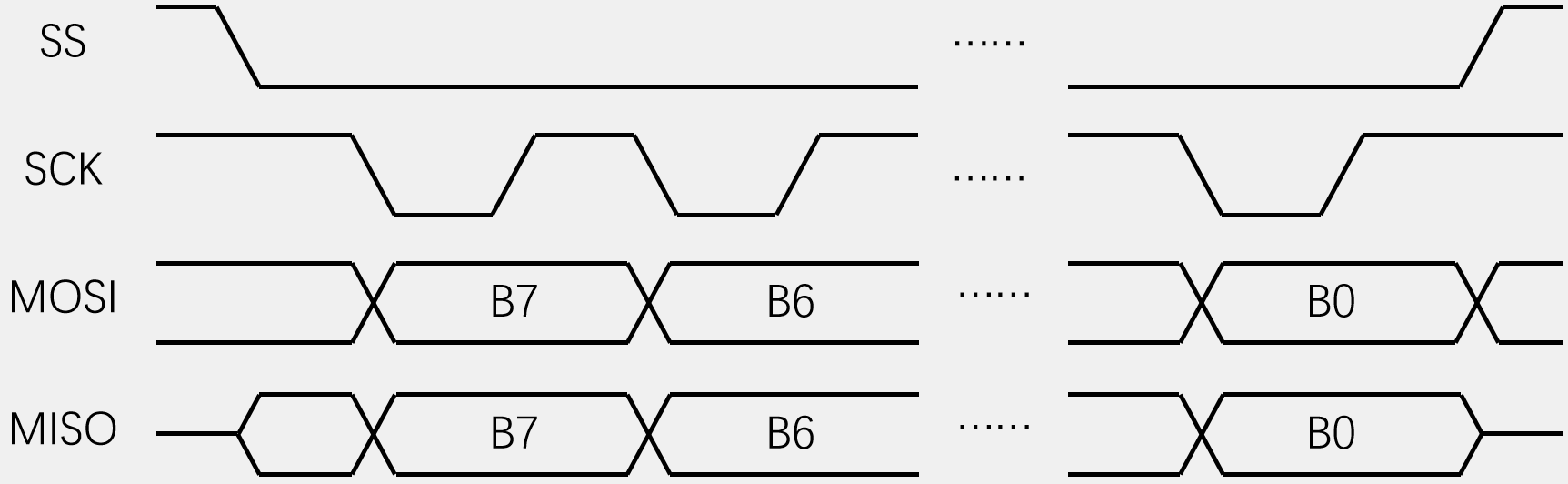
【交换一个字节(模式2)】
- CPOL=1:空闲状态时,SCK为高电平
- CPHA=0:SCK第一个边沿移入数据,第二个边沿移出数据
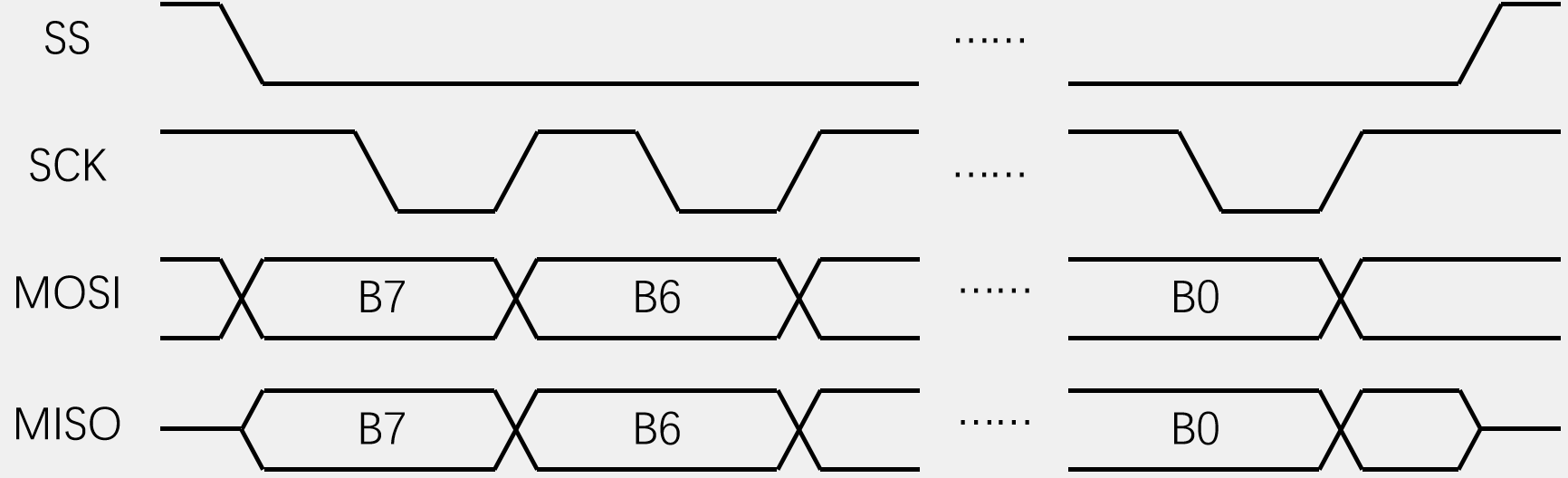
【交换一个字节(模式3)】
- CPOL=1:空闲状态时,SCK为高电平
- CPHA=1:SCK第一个边沿移出数据,第二个边沿移入数据
3.5 SPI时序
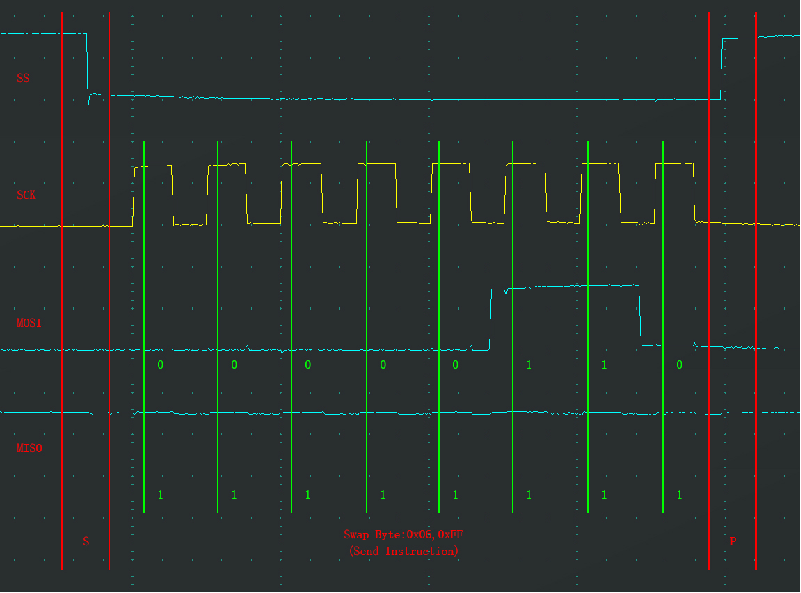
3.5.1 发送指令
在I2C中使用的是读写寄存器的模型(地址+数据),而SPI通常采用指令码加读写数据的模型(指令码+数据)。
3.5.2 指定地址写
向SS指定的设备,发送写指令(0x02),随后在指定地址(**Address[23:0]**)下,写入指定数据(Data)
W25Q64规定写指令之后的字节定义为地址高位。
3.5.3 指定地址读
向SS指定的设备,发送读指令(0x03),随后在指定地址(Address[23:0])下,读取从机数据(Data)
因为要读取数据,所以在指令码(0x03)+地址(0x123456)之后随便给从机一个数据,一般给0xFF,这时从机就会把0x123456地址下的数据通过MISO发给主机。如果主机继续发送数据,从机地址指针自动+1,就可以获取下一个地址的数据,实现多个地址接收。
3.6 SPI外设简介
- STM32内部集成了硬件SPI收发电路,可以由硬件自动执行时钟生成、数据收发等功能,减轻CPU的负担
- 可配置8位/16位数据帧(用得少)、高位先行(SPI基本都是)/低位先行(串口是低位先行)
- 时钟频率: fPCLK / (2, 4, 8, 16, 32, 64, 128, 256)
- 支持多主机模型、主或从操作
- 可精简为半双工/单工通信
- 支持DMA
- 兼容I2S协议(音频传输协议)
- STM32F103C8T6 硬件SPI资源:SPI1(72MHz)、SPI2(36MHz)
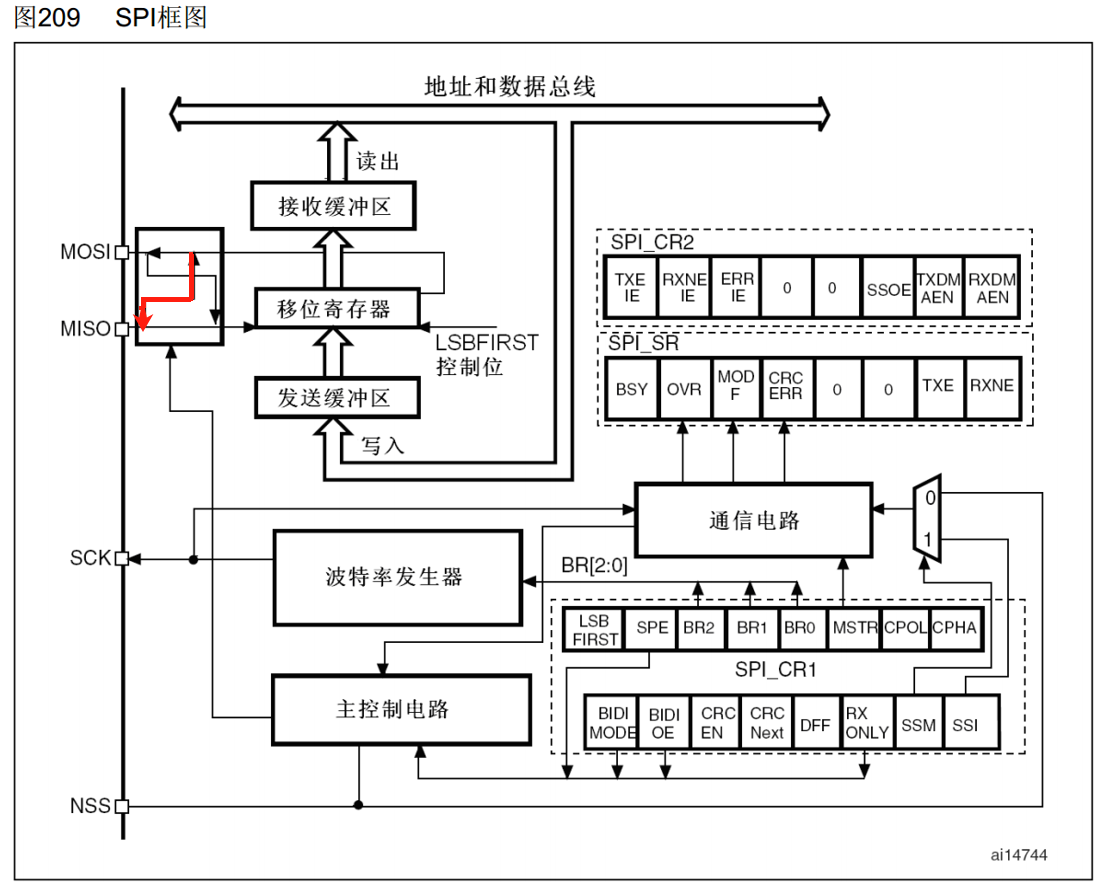
3.7 SPI框图

MOSI和MISO引脚交叉连接部分,用于引脚变化的,用于主从机切换,只当主机时就不用管了。其中箭头错误已更改。移位寄存器参考先前的移位示意图的内容。
略
3.8 SPI基本结构
注:阅读手册时候,手册不同部分的名词翻译会有略微区别,但指代一致,注意理解。
注意TDR、TXE、RDR、RXNE等标志位。框图缺少SS,这个引脚使用普通GPIO来模拟即可。
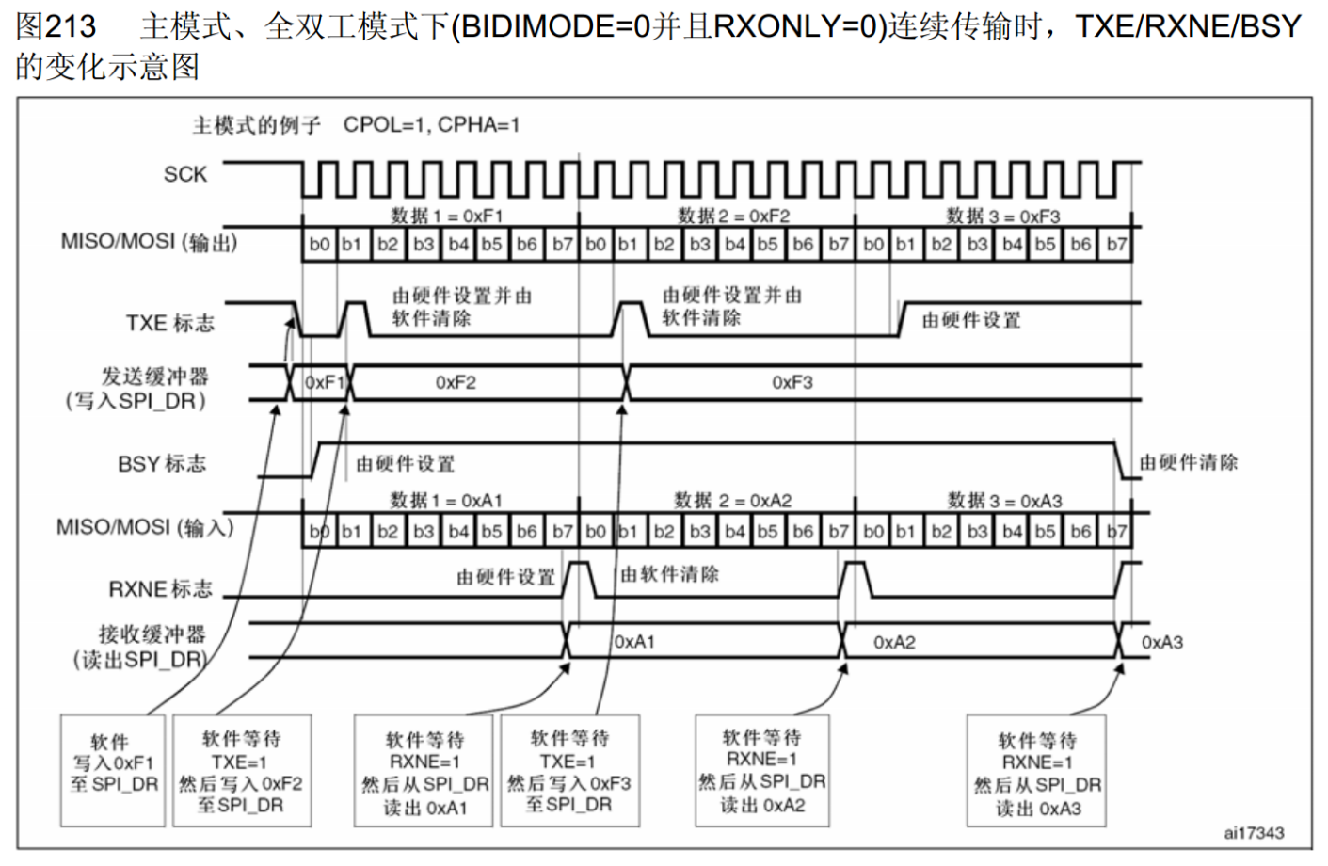
3.9 主模式传输操作
3.9.1 全双工连续传输
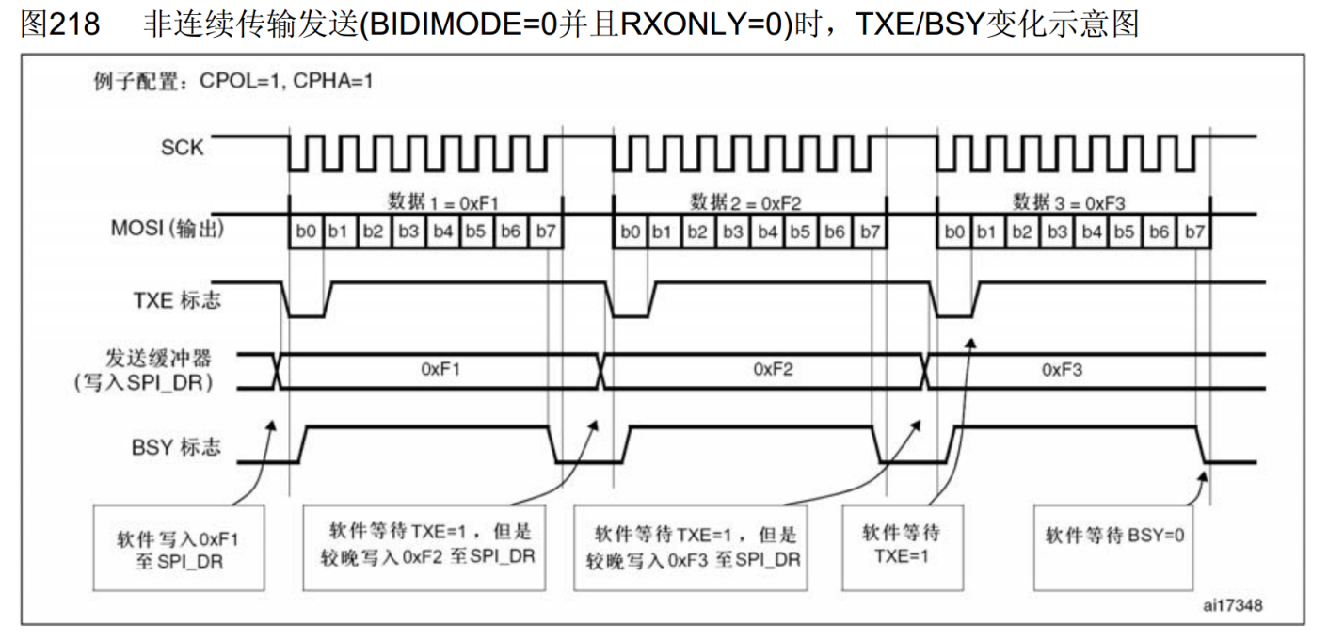
3.9.2 非连续传输
正常考虑这个传输方式。
【区别】:当TXE置1后,第一个字节写入TDR,等待传输第一个字节时序结束,即接收完成,这时RXNE会置1,然后把第一个接受到的数据从RDR读出来(较晚写入的原因),之后再写入下一个字节数据。
【总结】:
①等待TXE置1。②写入TDR数据。③等待RXNE置1。④读取RDR数据
继续循环等待TXE…再写入TDR数据…..将这4步骤封装成一个函数,掉一次写入一个字节,实现起来就非常简单。
【缺点】:在TXE置1的位置,没有及时把下一个数据写入TDR等候着,当读取数据完成后,下一个字节数据还没有传输,就会使得字节与字节之间有等待间隙。慢的时钟速度下不明显,但一快起来就明显拖慢。

因此在追求最高性能的,还是使用连续传输操作逻辑或者进一步采用DMA转运。
3.10 软硬件波形对比


手册,略
【案例】硬件SPI读写W25Q64
① 使能相关时钟:开启 SPI1、GPIO(SCK、MOSI、MISO、CS)时钟,SPI1 属于 APB2 总线,GPIOA 属于 APB2 总线:
1
2
3
4
5
6
7
8
9
10
11
| #include "stm32f10x.h"
#define W25Q_SCK_PIN GPIO_Pin_5
#define W25Q_MOSI_PIN GPIO_Pin_7
#define W25Q_MISO_PIN GPIO_Pin_6
#define W25Q_CS_PIN GPIO_Pin_4
#define W25Q_SPI SPI1
void W25Q64_Init(void) {
RCC_APB2PeriphClockCmd(RCC_APB2Periph_SPI1 | RCC_APB2Periph_GPIOA, ENABLE);
|
② 配置 SPI GPIO 引脚:SCK、MOSI 为复用推挽输出,MISO 为浮空输入,CS 为推挽输出:
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
| GPIO_InitTypeDef GPIO_InitStructure;
GPIO_InitStructure.GPIO_Pin = W25Q_SCK_PIN | W25Q_MOSI_PIN;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStructure);
GPIO_InitStructure.GPIO_Pin = W25Q_MISO_PIN;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING;
GPIO_Init(GPIOA, &GPIO_InitStructure);
GPIO_InitStructure.GPIO_Pin = W25Q_CS_PIN;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;
GPIO_SetBits(GPIOA, W25Q_CS_PIN);
GPIO_Init(GPIOA, &GPIO_InitStructure);
|
③ 初始化 SPI 参数:设置为主机模式,时钟极性 / 相位(CPOL=1,CPHA=1,匹配 W25Q64):
1
2
3
4
5
6
7
8
9
10
11
12
13
| SPI_InitTypeDef SPI_InitStructure;
SPI_InitStructure.SPI_Direction = SPI_Direction_2Line_FullDuplex;
SPI_InitStructure.SPI_Mode = SPI_Mode_Master;
SPI_InitStructure.SPI_DataSize = SPI_DataSize_8b;
SPI_InitStructure.SPI_CPOL = SPI_CPOL_High;
SPI_InitStructure.SPI_CPHA = SPI_CPHA_2Edge;
SPI_InitStructure.SPI_NSS = SPI_NSS_Soft;
SPI_InitStructure.SPI_BaudRatePrescaler = SPI_BaudRatePrescaler_2;
SPI_InitStructure.SPI_FirstBit = SPI_FirstBit_MSB;
SPI_InitStructure.SPI_CRCPolynomial = 7;
SPI_Init(W25Q_SPI, &SPI_InitStructure);
SPI_Cmd(W25Q_SPI, ENABLE);
|
④ 实现 SPI 单字节收发函数:
1
2
3
4
5
6
7
8
9
10
|
uint8_t SPI_WriteReadByte(uint8_t tx_data) {
while (SPI_I2S_GetFlagStatus(W25Q_SPI, SPI_I2S_FLAG_TXE) == RESET);
SPI_I2S_SendData(W25Q_SPI, tx_data);
while (SPI_I2S_GetFlagStatus(W25Q_SPI, SPI_I2S_FLAG_RXNE) == RESET);
return SPI_I2S_ReceiveData(W25Q_SPI);
}
|
⑤ 实现 W25Q64 基础控制函数(片选、唤醒、擦除等):
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
|
void W25Q_Select(void) {
GPIO_ResetBits(GPIOA, W25Q_CS_PIN);
}
void W25Q_Deselect(void) {
GPIO_SetBits(GPIOA, W25Q_CS_PIN);
}
uint16_t W25Q_ReadID(void) {
uint16_t id;
W25Q_Select();
SPI_WriteReadByte(0x90);
SPI_WriteReadByte(0x00);
SPI_WriteReadByte(0x00);
SPI_WriteReadByte(0x00);
id = (SPI_WriteReadByte(0xFF) << 8) | SPI_WriteReadByte(0xFF);
W25Q_Deselect();
return id;
}
void W25Q_WriteEnable(void) {
W25Q_Select();
SPI_WriteReadByte(0x06);
W25Q_Deselect();
}
void W25Q_WaitBusy(void) {
W25Q_Select();
SPI_WriteReadByte(0x05);
while ((SPI_WriteReadByte(0xFF) & 0x01) == 0x01);
W25Q_Deselect();
}
|
⑥ 实现扇区擦除函数(W25Q64 最小擦除单位为 4KB 扇区):
1
2
3
4
5
6
7
8
9
10
11
12
13
14
| void W25Q_EraseSector(uint32_t addr) {
W25Q_WriteEnable();
W25Q_WaitBusy();
W25Q_Select();
SPI_WriteReadByte(0x20);
SPI_WriteReadByte((addr >> 16) & 0xFF);
SPI_WriteReadByte((addr >> 8) & 0xFF);
SPI_WriteReadByte(addr & 0xFF);
W25Q_Deselect();
W25Q_WaitBusy();
}
|
⑦ 实现页写入函数(W25Q64 一页为 256 字节):
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
| void W25Q_WritePage(uint32_t addr, uint8_t *data, uint16_t len) {
if (len > 256) len = 256;
W25Q_WriteEnable();
W25Q_WaitBusy();
W25Q_Select();
SPI_WriteReadByte(0x02);
SPI_WriteReadByte((addr >> 16) & 0xFF);
SPI_WriteReadByte((addr >> 8) & 0xFF);
SPI_WriteReadByte(addr & 0xFF);
for (uint16_t i = 0; i < len; i++) {
SPI_WriteReadByte(data[i]);
}
W25Q_Deselect();
W25Q_WaitBusy();
}
|
⑧ 实现连续读取函数:
1
2
3
4
5
6
7
8
9
10
11
12
13
| void W25Q_ReadData(uint32_t addr, uint8_t *data, uint16_t len) {
W25Q_Select();
SPI_WriteReadByte(0x03);
SPI_WriteReadByte((addr >> 16) & 0xFF);
SPI_WriteReadByte((addr >> 8) & 0xFF);
SPI_WriteReadByte(addr & 0xFF);
for (uint16_t i = 0; i < len; i++) {
data[i] = SPI_WriteReadByte(0xFF);
}
W25Q_Deselect();
}
|
⑨ 主函数使用示例(擦除→写入→读取验证):
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
| int main(void) {
uint8_t w_data[5] = {0x11, 0x22, 0x33, 0x44, 0x55};
uint8_t r_data[5];
uint16_t id;
W25Q64_Init();
id = W25Q_ReadID();
W25Q_EraseSector(0x00000);
W25Q_WritePage(0x00000, w_data, 5);
W25Q_ReadData(0x00000, r_data, 5);
while (1) {
}
}
|
笔记部分引用菜工啊潜
STM32标准库系列文章
STM32标准库笔记(一)-准备、GPIO、中断 | 超小韓の个人博客
STM32标准库笔记(二)-PWM、ADC、DMA | 超小韓の个人博客
STM32标准库笔记(三)-USART、I2C、SPI | 超小韓の个人博客
STM32标准库笔记(四)-BKP、RTC、PWR、WDG、FLASH | 超小韓の个人博客
