[TOC]
一、PWM 1.1 TIM输出比较 1.1.1 简介 【输出比较功能】
OC (Output Compare)输出比较,重要,主要用来输出PWM波形的,常用驱动电机。
输出比较可以通过比较CNT与CCR寄存器值的关系,来对输出电平进行置1、置0或翻转的操作,用于输出一定频率和占空比的PWM波形
每个高级定时器和通用定时器 都拥有4个输出比较通道(课程主要讨论通用定时器的输出比较功能)
高级定时器的前3个通道额外拥有死区生成和互补输出的功能
【PWM简介】
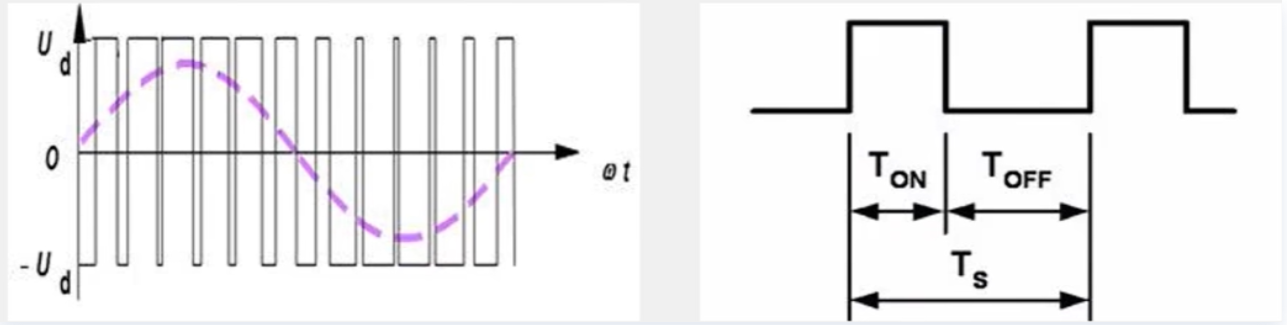
PWM (Pulse Width Modulation)脉冲宽度调制
在具有惯性的系统 中,可以通过对一系列脉冲的宽度进行调制,来等效地获得所需要的模拟参量,常应用于电机控速等领域
PWM参数: 频率=1/ Ts、占空比= Ton/ Ts、分辨率=占空比变化步距
波形也是有高低电平组成的,通过快速切换,产生。
1.1.2 输出比较通道(通用)
通用定时器通道1和高级定时器的第四个通道基本是一样的。
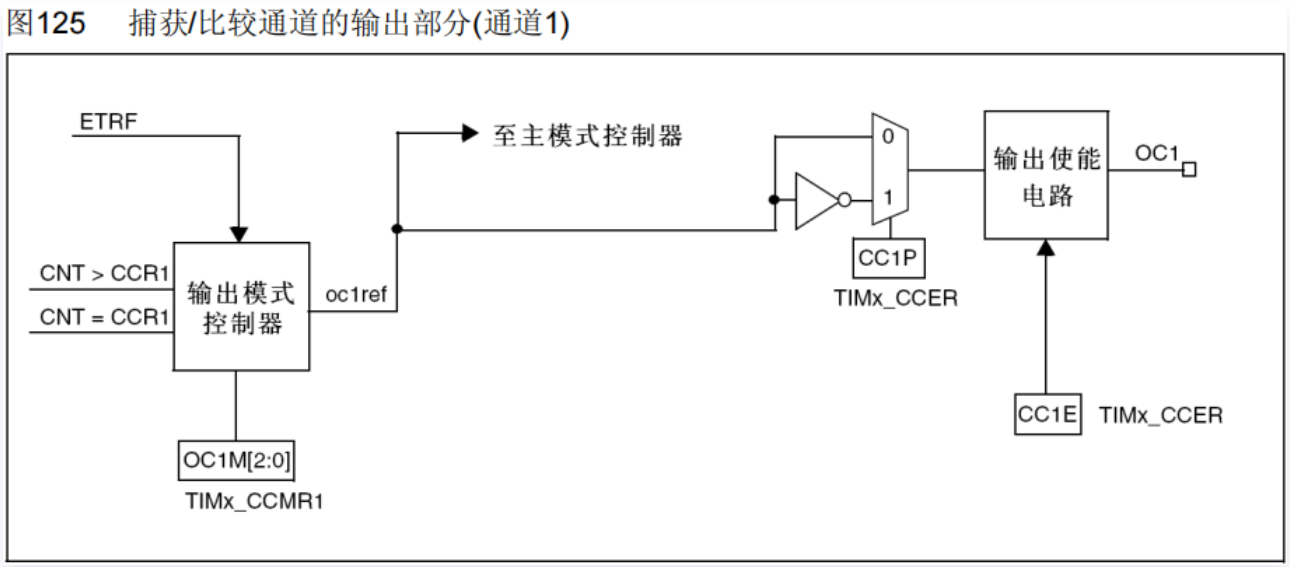
主要流程说明: ETRF输入是定时器的一个小功能,一般不用,不需要了解/CNT和CCR1 比较产生信号——传入输出模式控制器 ——改变OC1REF的高低电平——映射到主模式的控制器/主要是通往TIMx_CCER(极性选择,高低电平是否翻转)——输出使能,选择通道——通道输出
【输出模式控制器】: 八中模式
冻结模式:设置后输出停止,高低电平不变。
有效电平和无效电平通常用于高级定时器的说法关断、刹车功能配合表述的,可当成高低电平控制看待。
电平翻转:比如设置CCR=0时候,每次CNT更新清0就会产生一次CNT=CCR的事件,这就会导致输出电平翻转一次,每更新两次,输出为一个周期,占空比始终为50%;改变定时器频率时候,输出波形频率也会随之改变。输出波形的频率=更新频率/2
强制有效/无效电平:想暂停输出,并保存高电平或者低电平。
PWM模式1:频率和占空比都可调
PWM模式2:频率和占空比都可调,二者互为REF电平取反情况。比较灵活。
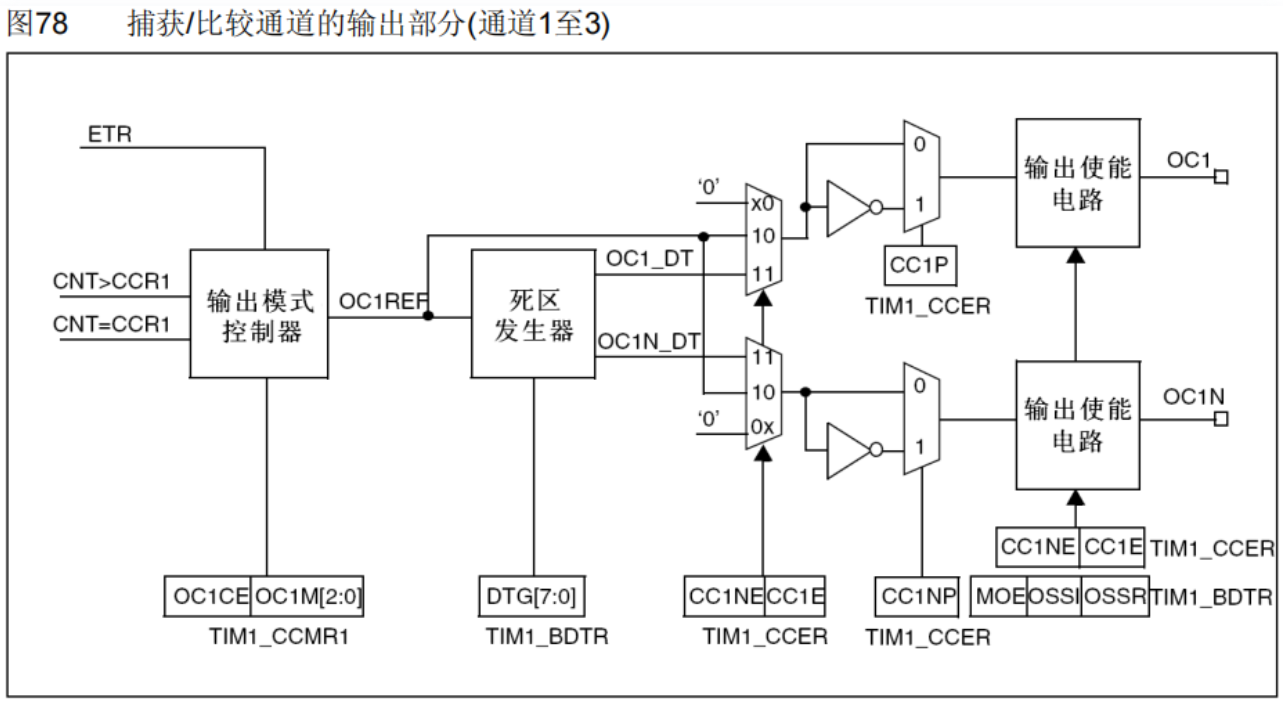
1.1.3 输出比较通道(高级)
OC1和OC1N是互补输出。死区发生器是防止两个输出同时打开,发热损耗。
感兴趣自行了解一下。
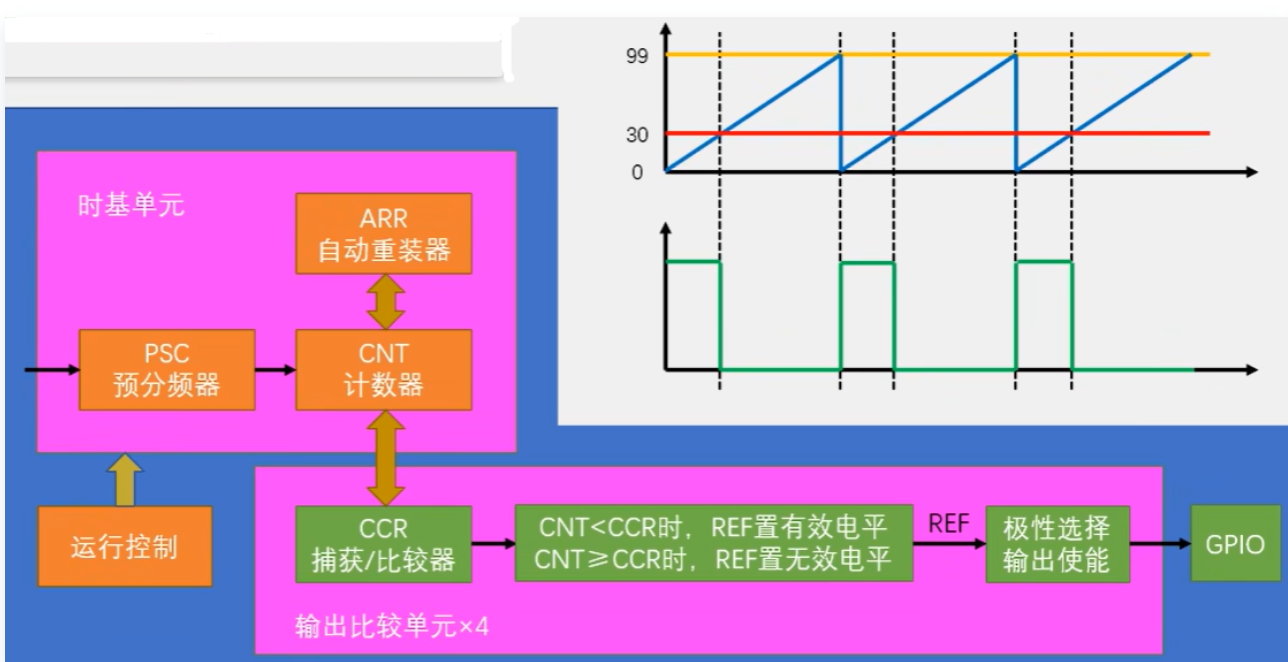
1.1.4 PWM产生 本节最重要内容:
【运行控制+时基单元】左边的时钟源选择,进入到时基单元后进行相关配置,配置好后CNT计数器就可以不断的自增运行了——往下进入输出比较单元
【输出比较单元】 一共有4路。最开始是进入CCR捕获/比较寄存器(上图CCR比较的值 ——输出模式控制(图中假设选择了PWM1模式),输出REF电平——IO输出
【PWM参数计算】
PWM频率:**Freq= CK_ PSC/(PSC+ 1)/ (ARR+ 1)**,PWM的频率=更新周期
PWM占空比:**Duty= CCR/ (ARR+ 1)**,CCR的变化范围取决于ARR的值
PWM分辨率:**Reso= 1/(ARR+1)**
【案例】PWM产生 ①使能相关外设时钟
PWM 输出需要用到 定时器时钟 和 GPIO 时钟 ,以及 GPIO 复用功能的时钟(AFIO)。
TIM3 属于 APB1 总线外设,时钟由 APB1 提供;
GPIOA 属于 APB2 总线外设,时钟由 APB2 提供;
复用功能需要使能 AFIO 时钟(部分型号可不显式使能,但建议加上)。
1 2 3
②配置 PWM 输出引脚(GPIO)
PWM 输出引脚需配置为 复用推挽输出 (因为引脚功能由定时器控制,而非普通 GPIO)。以 TIM3_CH1 对应的 PA6 为例:
1 2 3 4 5 6 7 GPIO_InitTypeDef GPIO_InitStructure;
③配置定时器时基参数(确定 PWM 周期)
定时器时基参数决定 PWM 的周期,核心参数包括:
预分频系数(PSC) :降低定时器计数频率;自动重装载值(ARR) :计数器计数到该值后复位,决定周期;计数模式 :通常用向上计数(从 0 到 ARR 循环)。
周期计算公式 :PWM周期 = (ARR + 1) * (PSC + 1) / 定时器时钟频率(STM32F103 中,TIM3 时钟默认 72MHz,因 APB1 预分频为 2 时,定时器时钟 = APB1 时钟 ×2=36MHz×2=72MHz)
示例:配置 1kHz 的 PWM(周期 1ms):72MHz / (PSC+1) = 1MHz(计数频率 1MHz,即 1μs 计数一次),则PSC=71(72MHz/(71+1)=1MHz);ARR=999(计数从 0 到 999,共 1000 次,每次 1μs,总周期 1000μs=1ms)。
1 2 3 4 5 6 7 8 TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;999 ; 71 ; 0 ;
④配置 PWM 通道参数(确定占空比)
每个定时器有多个通道(如 TIM3 有 CH1~CH4),需为对应通道配置 PWM 模式、输出使能、比较值(CCR,决定占空比)等。
核心参数:
PWM 模式 :模式 1(CNT < CCR 时输出有效电平)或模式 2(相反);比较值(CCR) :占空比 = (CCR / ARR) × 100%(示例中 ARR=999,CCR=500 对应 50% 占空比);输出极性 :有效电平为高或低(默认高电平)。
1 2 3 4 5 6 7 8 TIM_OCInitTypeDef TIM_OCInitStructure;0 ;
⑤使能预装载寄存器(确保参数生效)
定时器的 ARR(自动重装载值)和 CCR(比较值)通常需要通过预装载寄存器生效,需手动使能:
1 2 3 4
⑥启动定时器,输出 PWM
最后使能定时器计数,PWM 波形即可从配置的引脚输出:
⑦动态修改占空比(可选)
通过修改 CCR 值可实时调整占空比,使用库函数TIM_SetComparex(x 为通道号):
1 2 3 4 void TIM3_SetDuty (u16 ccr) {
完整初始化函数整合
将上述步骤整合为一个初始化函数,方便调用:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 #include "stm32f10x.h" void TIM3_PWM_Init (u16 arr, u16 psc) {0 ;0 ;void TIM3_SetDuty (u16 ccr) {
1.2 TIM输入捕获 1.2.1 简介
IC (Input Capture)输入捕获
输入捕获模式下,当通道输入引脚出现指定电平跳变 时(跳变方向可配置,总的类似外部中断),当前CNT的值将被锁存到CCR中,可用于测量PWM波形的频率、占空比、脉冲间隔、电平持续时间等参数
每个高级定时器和通用定时器都拥有4个输入捕获通道
可配置为PWMI模式 ,同时测量频率和占空比
可配合主从触发模式 ,实现硬件全自动测量
1.2.2 频率测量
测频法: 在闸门时间T内,对上升沿计次,得到N,则频率测周法: 两个上升沿内,以标准频率f。定时器计次,得到N,则频率中界频率: 测频法与测周法(都有±1误差,N越大误差越小)误差相等的频率点待测信号频率<中界频率时,使用测周法;待测信号频率>中界频率时,选用测频法。
定时器如何实现测周法?上升沿用于触发捕获,两上升沿间,时钟源fc产生的CNT 值作为N,用于计数计时,使用共享求得fx,清零CNT。
1.2.3 主从出发模式 主模式: 可以将定时器内部的信号,映射到TRGO引脚,用于触发别的外设
从模式: 接受其他外设或者自身的信号,即被别的信号控制 。其触发源选择就是选择从模式的出发信号源,信号源选择TRGI去触发从模式,从模式可以在列表中选择一项操作来自动 执行。(详情查看手册)
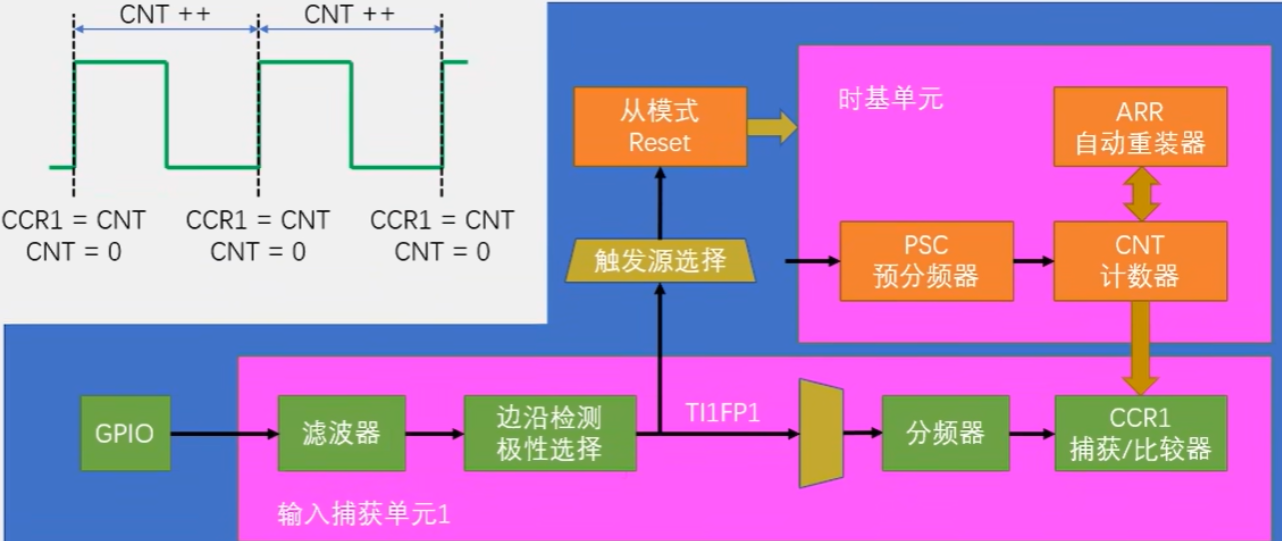
1.2.4 输入捕获基本结构 TI1FP1带来触发信号,首先转运CNT的值到CCR里去,再触发Reset从模式给CNT清零。CCR1的值始终是最新一个周期的计数值N。因此,想要计算频率,只需要读取CCR1的值,在计算fc/N即可。纯硬件自动。
注: 这里的CNT是有计数上限的,ARR一般设置为最大65535。如果信号频率太低,CNT计完就溢出了。另外从模式清零只有TI1FP1,TI2FP2,通道3、4只能开启捕获中断,在中断里手动清理,会消耗软件资源。
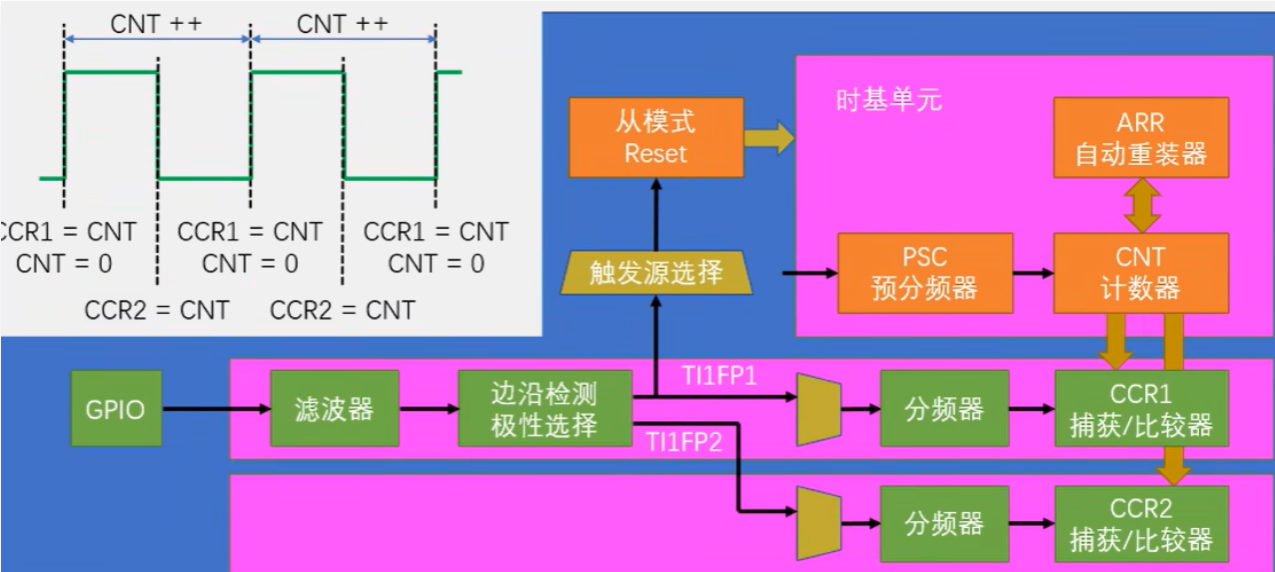
1.2.5 PWMI基本结构 这个PWMI模式,使用了两个通道同时捕获一个引脚。如图中波形,上升沿、下降沿都捕获 ,CCR1值上升沿开始的是整个周期,而在其中CCR2下降沿触发,只有半个周期(高电平)值。此时二者一除便是占空比。
【案例】 输入捕获模式测频率 ① 使能相关时钟 :需开启定时器、GPIO 及复用功能(AFIO)的时钟。以 TIM2_CH1(PA0)为例,TIM2 属于 APB1 总线,GPIOA 属于 APB2 总线,代码如下:
1 2 RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM2, ENABLE);
② 配置 GPIO 为输入模式 :输入捕获引脚需设为浮空输入(或上拉 / 下拉,根据信号特性)。PA0 作为 TIM2_CH1 输入,配置如下:
1 2 3 4 5 GPIO_InitTypeDef GPIO_InitStructure;
③ 配置定时器时基参数 :设置计数频率和最大计数范围。例如,TIM2 时钟为 72MHz,预分频系数(PSC)设为 71,计数频率为 1MHz(1μs / 次);自动重装载值(ARR)设为 0xFFFF(最大范围,减少溢出):
1 2 3 4 5 6 TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;0xFFFF ; 71 ; 0 ;
④ 配置输入捕获模式 :设置通道、捕获边沿、滤波等参数。以通道 1 为例,捕获上升沿,启用滤波减少噪声:
1 2 3 4 5 6 7 TIM_ICInitTypeDef TIM_ICInitStructure;0x0F ;
⑤ 使能捕获中断与 NVIC :需开启定时器更新中断(处理溢出)和捕获中断,并配置中断优先级:
1 2 3 4 5 6 7 8 9 10 1 ; 1 ;
⑥ 启动定时器 :使能定时器开始计数,等待捕获信号:
⑦ 定义全局变量存储捕获数据 :用于记录捕获次数、计数值、溢出次数和频率:
1 2 3 4 u16 capture_cnt = 0 ; 2 ] = {0 }; 0 ; float freq = 0.0f ;
⑧ 编写中断服务函数处理捕获逻辑 :在中断中记录两次捕获值,计算周期和频率,处理溢出:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 void TIM2_IRQHandler (void ) {if (TIM_GetITStatus(TIM2, TIM_IT_Update) != RESET) {if (TIM_GetITStatus(TIM2, TIM_IT_CC1) != RESET) {if (capture_cnt == 0 ) {0 ] = TIM_GetCapture1(TIM2);0 ;1 ;else if (capture_cnt == 1 ) {1 ] = TIM_GetCapture1(TIM2);0xFFFF ) + (capture_val[1 ] - capture_val[0 ]);float period = total_cnt * 1e-6 f; if (period > 0 ) freq = 1.0f / period; 0 ;
⑨ 在 main 函数中初始化并使用 :调用初始化函数后,通过freq变量获取测量到的频率:
1 2 3 4 5 6 int main (void ) {while (1 ) {
【案例】 PWMI模式测频率占空比 ① 使能相关时钟 :开启定时器、对应 GPIO 及复用功能(AFIO)时钟。以 TIM3_CH1(PA6)和 CH2(PA7)为例(PWMI 模式需两个通道),TIM3 属于 APB1 总线,GPIOA 属于 APB2 总线:
1 2 RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM3, ENABLE);
② 配置 GPIO 为复用输入模式 :PWMI 模式的两个通道引脚需配置为浮空输入(或上拉 / 下拉),且复用为定时器功能。PA6(TIM3_CH1)和 PA7(TIM3_CH2)配置如下:
1 2 3 4 5 GPIO_InitTypeDef GPIO_InitStructure;
③ 配置定时器时基参数 :设置计数频率和最大计数范围,决定测量精度。例如,TIM3 时钟为 72MHz,预分频系数(PSC)设为 71,计数频率为 1MHz(1μs / 次);自动重装载值(ARR)设为 0xFFFF(最大范围):
1 2 3 4 5 6 TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;0xFFFF ; 71 ; 0 ;
④ 配置 PWMI 模式 :以 CH1 为参考通道(捕获上升沿),CH2 自动配置为捕获下降沿,无需手动设置 CH2 参数(库函数自动关联):
1 2 3 4 5 6 7 8 TIM_ICInitTypeDef TIM_ICInitStructure;0x0F ;
⑤ 设置从模式触发 :让定时器在参考通道(CH1)捕获时复位计数器,确保周期测量准确(计数器从 0 开始计数,避免溢出计算复杂):
1 2 3 TIM_SelectInputTrigger(TIM3, TIM_TS_TI1FP1);
⑥ 使能中断与配置 NVIC :开启 CH1 捕获中断(周期测量)和 CH2 捕获中断(占空比测量),并配置中断优先级:
1 2 3 4 5 6 7 8 9 10 1 ; 1 ;
⑦ 启动定时器 :使能定时器开始计数,等待捕获 PWM 信号:
⑧ 定义全局变量存储测量数据 :记录周期、高电平时间、频率和占空比:
1 2 3 4 u32 period_cnt = 0 ; 0 ; float freq = 0.0f ; float duty = 0.0f ;
⑨ 编写中断服务函数处理测量逻辑 :CH1 捕获上升沿时记录周期,CH2 捕获下降沿时记录高电平时间,计算频率和占空比:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 void TIM3_IRQHandler (void ) {if (TIM_GetITStatus(TIM3, TIM_IT_CC1) != RESET) {if (period_cnt > 0 ) {1e6 f / period_cnt; if (TIM_GetITStatus(TIM3, TIM_IT_CC2) != RESET) {if (period_cnt > 0 ) {float )high_cnt / period_cnt * 100.0f ;
⑩ 在 main 函数中初始化并使用 :调用初始化函数后,通过freq和duty变量获取频率和占空比:
1 2 3 4 5 6 7 8 9 int main (void ) {while (1 ) {
1.3 编码器
Encoder Interface 编码器接口
编码器接口可接收增量**(正交)编码器的信号,根据编码器旋转产生的正交信号脉冲, 自动控制CNT自增或自减(带方向的计次,只需要获取CNT的值即可
每个高级定时器和通用定时器都拥有1个 编码器接口(一般有硬件资源的时候优先使用硬件资源)
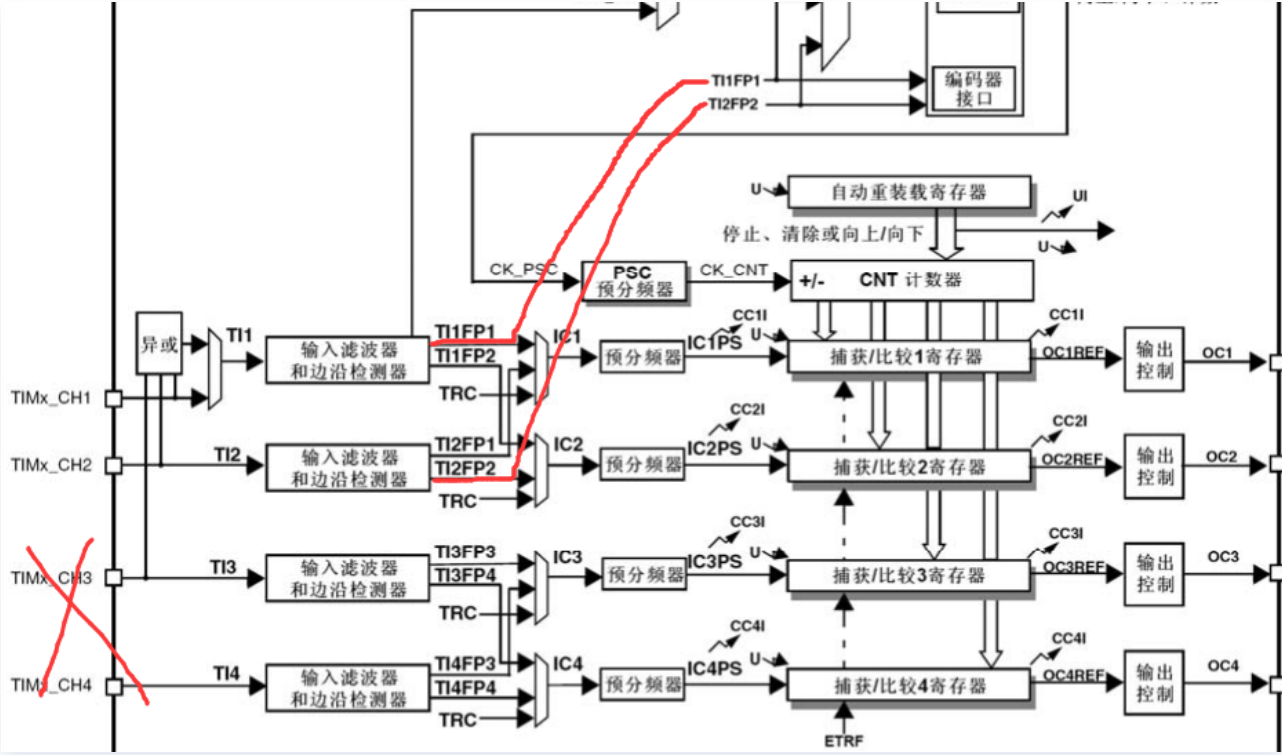
两个输入引脚借用了输入捕获的通道1和通道2
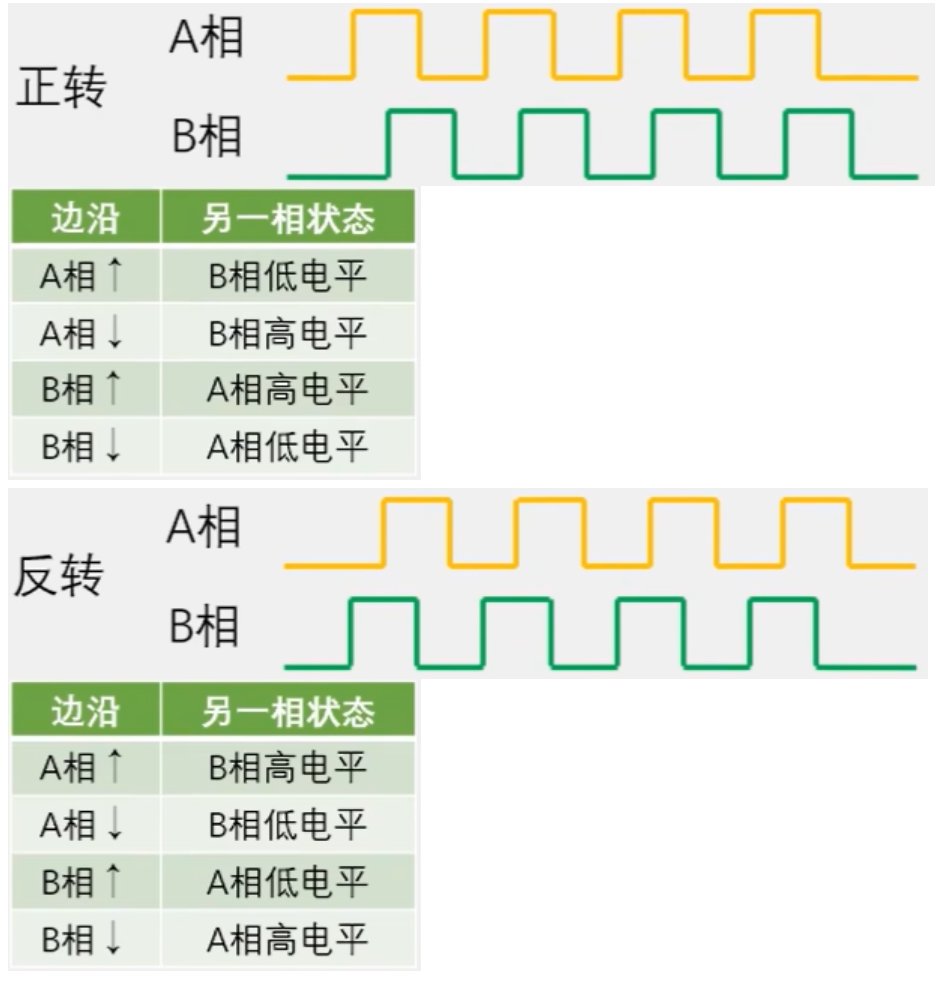
1.3.1 正交编码器 当旋转编码器转起来时候,会产生两路方波。方波频率代表速度,二者相位比较即可得到方向。通过列表发现二者状态相反,因此首先把A、B相的所有边沿作为计数器的计数时钟,出现边沿信号时候,就计数器自增或者自减,而这个增减由另一项的状态来确定。
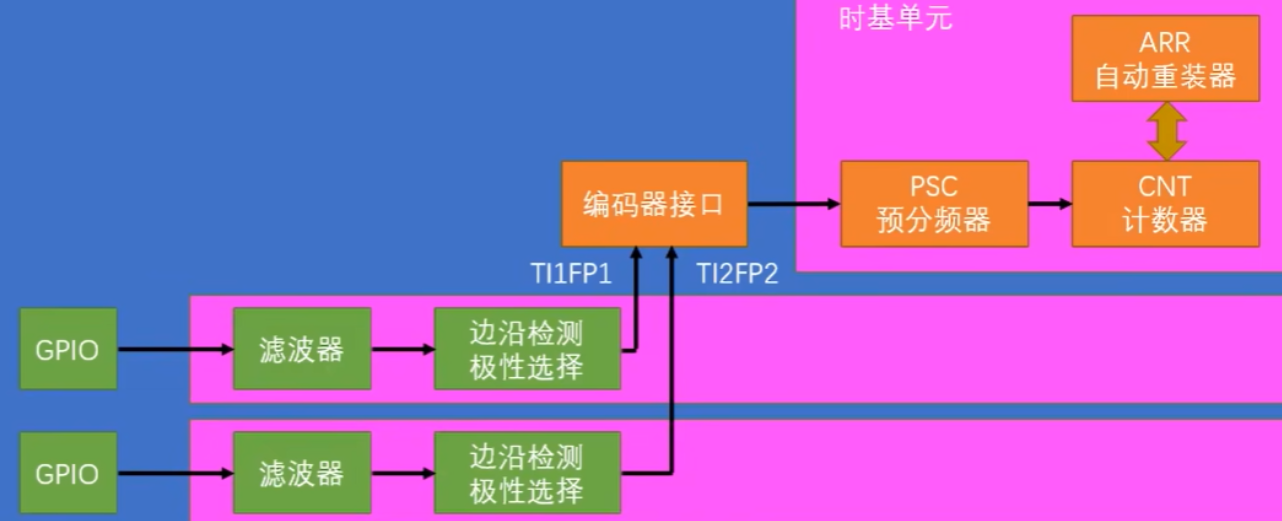
1.3.2 定时器编码器框图 高级定时器和通用定时器都拥有1个 编码器接口,普通定时器没有。
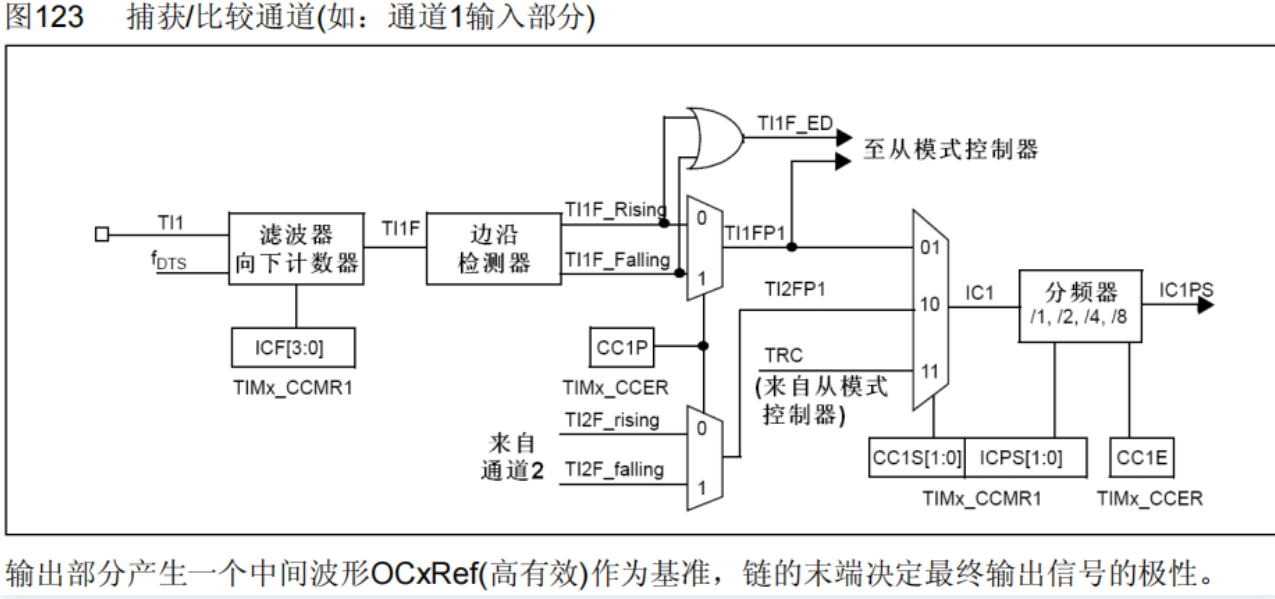
可以看到编码器的两个输入引脚 借用了输入捕获单元的前两个通道CH1/CH2 。输入部分滤波和边缘检测编码器都有使用(可参考下图)。
编码器输出部分相当于从模式控制器,去控制CNT的计数时钟和计数方向,即如果出现边沿信号,并且另一相的状态为正转,CNT自增,否则自减。此时触发控制处于编码器接口托管的状态,72M计数时钟和时基单元计数方向并不会被使用。
1.3.3 编码器接口基本结构
可以通过设置ARR的数值为65535,通过补码的特性,很容易得到负数。
1.3.4 工作模式 A相——TI1FP1;B相——TI2FP2;
【实例】
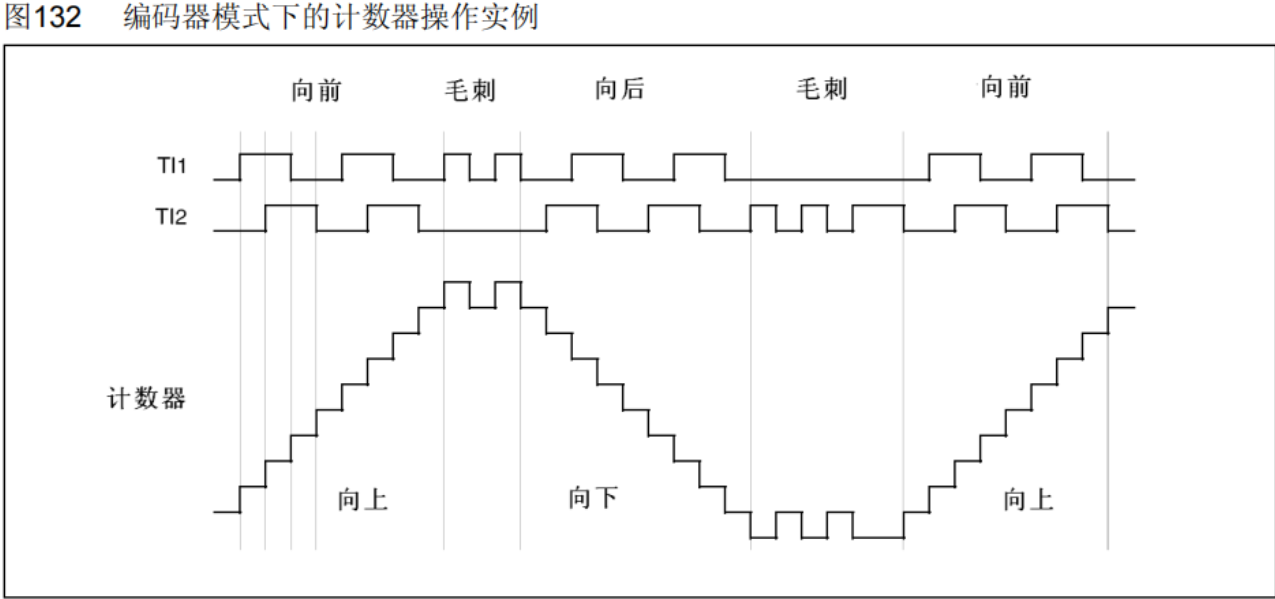
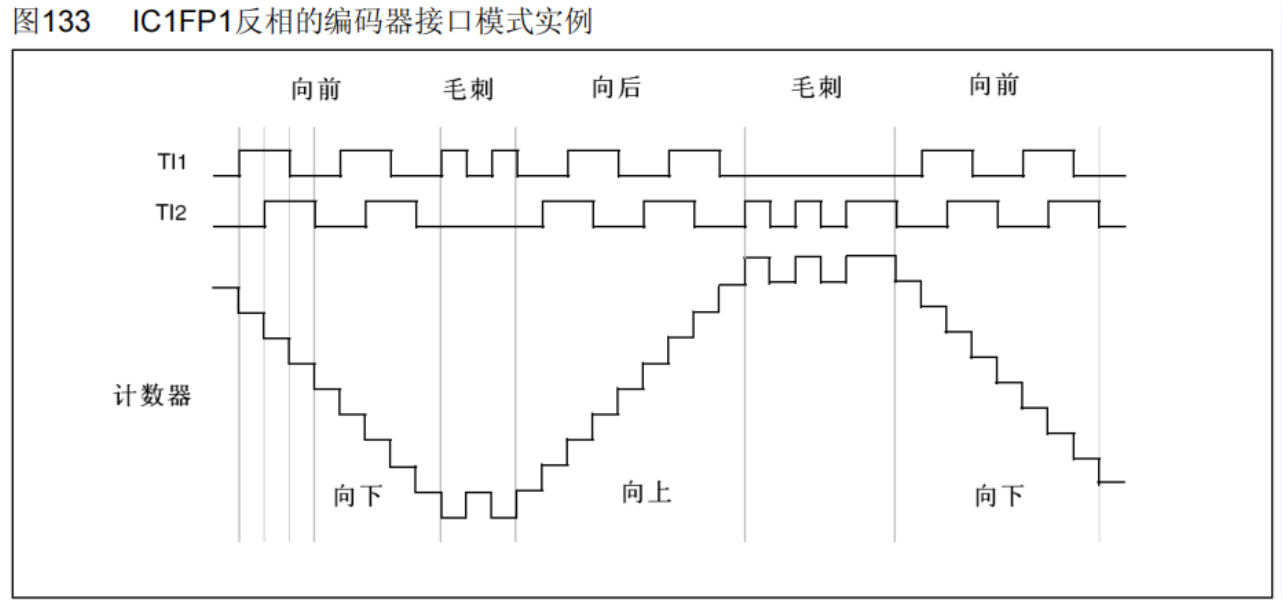
抗噪声: 毛刺当中,即出现一个脚不动,另一个脚来回跳变的情况,计数器就会加减加减来回摆动,最终计数值不变,不受影响。
反相: 即框图中,本来极性选择是上升沿有效还是下降沿有效,但在编码器中都有效,因此此时的极性选择变成了高低电平的极性选择。如果选择上升沿的参数,信号直通过来,高低电平极性不翻转。如果选择下降沿参数,信号就通过一个非门过来,高低电平极性反转。
因此,根据波形查表的时候,需要将反相TI1的波形取反, 再查表才能得到正确的计数器状态。
可以灵活运用控制编码器计数方向和增减。
【案例】 编码器接口测速 ① 编码器接口原理 :STM32 定时器的编码器接口可直接连接正交编码器(A、B 相输出),通过捕获 A、B 相的脉冲边沿变化,自动计数并反映电机旋转方向和速度。正交编码器的 A、B 相脉冲相差 90°,通过相位差判断方向,通过脉冲数计算转速。
② 使能相关时钟 :开启定时器、编码器 A/B 相连接的 GPIO 及复用功能时钟。以 TIM4(常用作编码器接口)为例,CH1 接 PB6(A 相),CH2 接 PB7(B 相),TIM4 属于 APB1 总线,GPIOB 属于 APB2 总线:
1 2 RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM4, ENABLE);
③ 配置 GPIO 为复用推挽输入 :编码器 A、B 相引脚需复用为定时器输入,配置为上拉输入(确保无信号时电平稳定):
1 2 3 4 5 GPIO_InitTypeDef GPIO_InitStructure;
④ 配置定时器编码器模式 :设置 TIM4 为编码器接口模式,同时捕获 A、B 相的上升沿和下降沿(4 倍频,提高精度):
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;0xFFFF ; 0 ; 0 ;0x0F ;
⑤ 配置定时器更新中断(可选) :若需处理计数器溢出(如长时间测速),可开启更新中断:
1 2 3 4 5 6 7 8 9 10 2 ;2 ;
⑥ 启动定时器 :使能计数器开始计数,编码器转动时 TIM4 的 CNT 值会自动增减(正转增,反转减):
1 2 TIM_SetCounter(TIM4, 0 );
⑦ 定义全局变量存储测速数据 :记录脉冲数、方向和转速:
1 2 3 int16_t encoder_cnt = 0 ; float speed = 0.0f ; uint8_t dir = 0 ;
⑧ 定时读取脉冲数并计算转速 :通过定时器(如 SysTick)定时(如 10ms)读取 CNT 值,计算单位时间内的脉冲数,再换算为转速。示例:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 #define PPR 1000 #define SAMPLE_TIME 0.01f void Get_Speed (void ) {int16_t current_cnt = (int16_t )TIM_GetCounter(TIM4);0 );0 ) ? 0 : 1 ;float )abs (current_cnt) / (PPR * 4.0f ) / SAMPLE_TIME;
⑨ 编写中断服务函数处理溢出(可选) :若计数器溢出,通过中断修正累计脉冲数:
1 2 3 4 5 6 7 8 int32_t total_cnt = 0 ; void TIM4_IRQHandler (void ) {if (TIM_GetITStatus(TIM4, TIM_IT_Update) != RESET) {0 ) ? 0x10000 : -0x10000 ;
⑩ 在 main 函数中初始化并定时测速 :
1 2 3 4 5 6 7 8 9 10 int main (void ) {while (1 ) {
二、ADC 2.1 简介
ADC (Analog-Digital Converter)模拟-数字转换器
ADC可以将引脚上连续变化的模拟电压转换为内存中存储的数字变量,建立模拟电路到数字电路的桥梁
12位(分辨率) 逐次逼近型ADC,1us (1MHz)转换时间输入电压范围:0~3.3 V,对应转换结果范围:04095(02^12-1)
18个输入通道,可 测量16个外部和2个内部信号源
规则组 (常规事件)和注入组 (突发事件)两个转换单元模拟看门狗自动监测输入电压范围
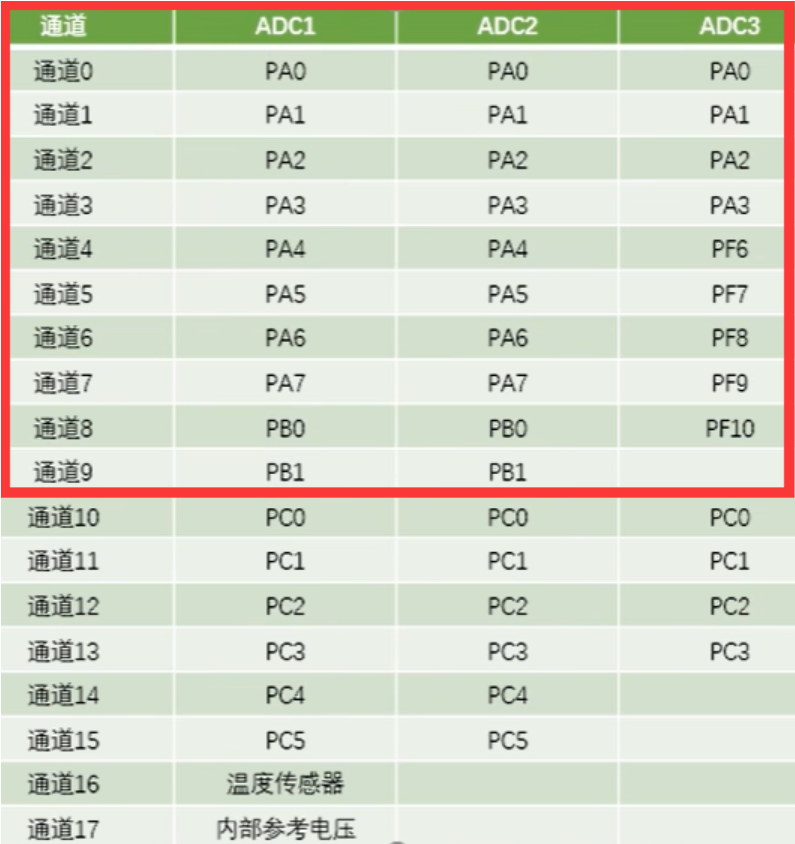
STM32F103C8T6 ADC资源:ADC1、ADC2, 10个外部输入通道
一般读取引脚我们只能获取高电平或者低电平,但是使用ADC之后,就可以把高低电平之间的任意电压进行量化,最终用一个变量表示,读取这个变量,就可以知道计算得知具体电压。
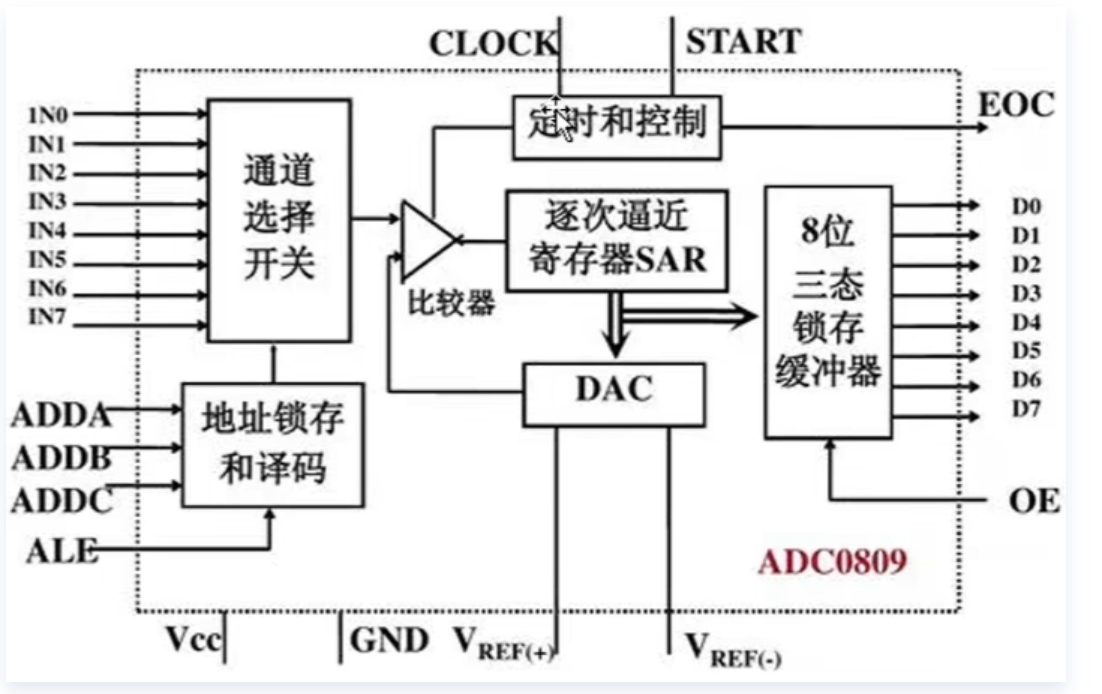
2.2 ADC原理结构 2.2.1 逐次逼近型ADC学习 以前单片机性能不强的时候,需要外挂一块ADC芯片才能进行AD转换,,下图中的通道选择开关表示一个可以通过模拟信号的数据选择器,有多少ADC的通道数即多少的开关,STM32内部的ADC有18个输入通道。
那么如何知道通道输入的电压是多少呢?通过比较器进行逐次的比较,即从高位到低位依次判断是1还是0的过程。(8位判断8次,12位判断12次,具体可以参考C51教程)一遍遍的比较至近似相等 。
VREF参考电压: 用于DAC输出电压比较值,也可以说是整个ADC的参考电压。一般情况下ADC的输入范围和供电是一致的。(不一样的,比如音频的ADC)
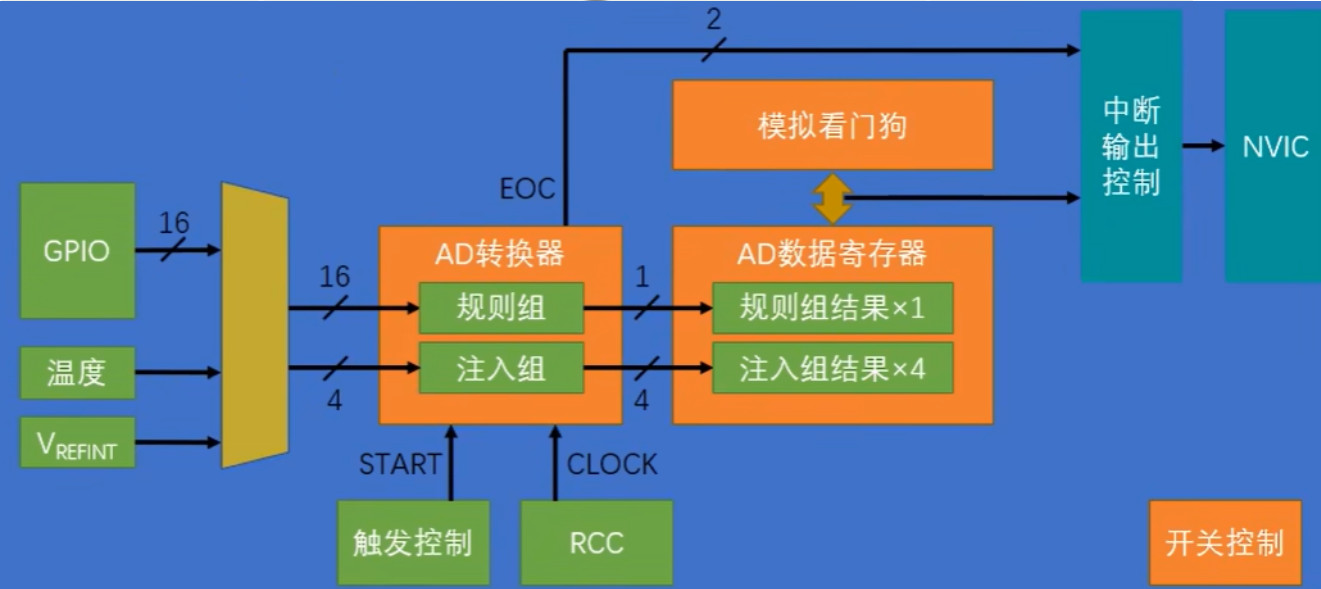
2.2.2 ADC框图 非常重要,反复观看。
内部18个通道: 16个IO口+1个温度传感器+VREFINT内部参考电压进入到模拟多路开关 再进入到模数转换器 ,即逐次比较的过程。转换的12位 数据结果会放置到16位数据寄存器 里,读取即可获得转换值。 注意转换可以多通道进行 ,并且分成了规则/注入两个通道组 。ps:主要是讨论规则组使用,注入组自行查看手册。
触发ADC转换的信号: ①软件触发,在程序中调用一条代码,就可以启动转换了。②硬件触发,就是这里的这些触发源(EXTI_11/EXTI15开始连接的两控制器)。
参考电压: 芯片的VDDA和VSSA在电路中默认接了VREF,因此没有VREF±引脚。同电源0~3.3V
ADCCLK: 来源于外设总线预分频器,最大14MHz,因此把时钟源分频时候不能弄超了。
数据寄存器: 存数据
DMA数据搬运功能:下节讲解
模拟看门狗: 可以存一个阈值高限和一个阈值低限。启动并指定了看门的通道,一旦数据超过限制范围,就会乱叫,即申请一个中断AWD。
通道组完成信号: 转换完成之后,也会有一个信号,EOC是规则组的完成信号,JEOC注入组完成信号。这些信号可以渠道NVIC申请中断
2.2.3 ADC基本结构 使能ADC:选择输入通道——开关选择——进入转换器(分两组)——接收触发和时钟信号,开始转换,发送转换完成信号,输出数据保存到寄存器(不同组寄存器个数不同)——申请中断——….
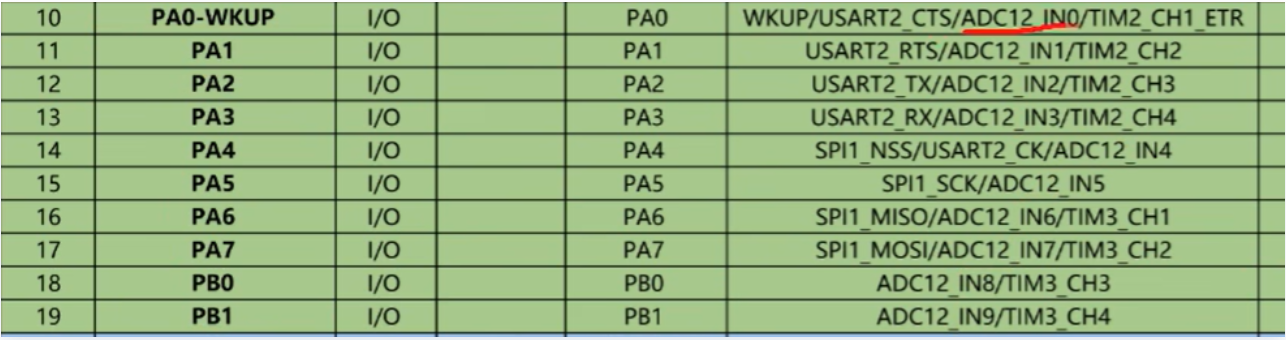
手册引脚中只有IN0~9共10个通道,其他地方就没有了。因此芯片只有10个外部输入通道。下图中ADC12_IN0的意思是ADC1和ADC2的IN0都是在PA0上的,即引脚全都是相同的。因此ADC1和ADC2可以同时运行,即双ADC模式。比如可以配合组成同步或者交叉运行(对着一个通道交叉的采样,增大采样的频率) 。
本芯片没有ADC3。
2.2.4 规则组的四种转换模式 参数:单次/连续、扫描/非扫描
【单次转换,非扫描模式】
.png)
再非扫描模式下,只有序列1的位置有效, 这时候同时选中一组的方式就简化为选中一个的方式。但这一个位置可以选择不同的通道 ,然后触发转换一次。EOC标志位置1,整个转换过程结束。如果想再次转换,只能再次触发。如果想换通道,那就触发转换之前将其通道更改。(没有用到菜单列表
【连续转换,非扫描模式】
.png)
仍然是非扫描模式,菜单列表只用第一个 。区别是一次转换完成标志位置1结束后,还会继续触发转换(不需要等待时间 ),一旦开始,一直持续。想要数据就一直从寄存器去就是了。(但有可能功耗会上升)
【单次转换,扫描模式】
.png)
到这里,就很好理解这些参数了。扫描模式 ,每触发一次,转换结束后就会停下来。不过会把菜单列表的通道都转换了。(列表通道可以任意指定,可以重复指定 )因此,还需要有一个通道数目 参数。对指定数目进行一次转换,存放到数据寄存器中(为了防止数据被覆盖,需要及时使用DMA将数据搬运走 )。
ps: 至于有提问,EOC 标志位是不是应该每个通道转换后出现 ?这是要分情况说明的,关于这个问题可以在 ADC 实践视频中有补充讲解。暂时只需要注意防止数据被覆盖 的问题, 往下学或者仔细看手册问题会迎刃而解即可。(2024.08.12记录下问题,大家多多实践。)
①估计是内容划分裁剪导致的,补充看视频ADC代码的实践章节可以解惑。在代码实践部分老师有纠正补充提到“EOC是规则和注入组都会产生的,推荐以寄存器说明为主” ,并且说明了“规则组扫描模式存在数据覆盖问题,最好使用DMA来配合” ,这时候又没讲到DMA所以内容后放了。最后明确讲了扫描模式的过程,以及防覆盖的 解决方法。
②“规则组扫描模式多通道后产生EOC,因为过程中数据会被覆盖,需要DMA配合实现“ 。理论入门了解到这就够了,其它问题需要在实践中在结合说明。虽然困扰,但应该不影响往下学。
③这个问题要能理解,我觉得是需要规则/注入组+通道+转换模式+扫描模式+中断+DMA这些概念结合寄存器说明,一起来看才好理解。都要求一个视频里一下子讲完是听不下去的。先把主要的数据覆盖问题 。因为记得CubeMx里面还有一个End Of Conversion Selection(转换结束选择),就是用来配置选择 每个通道/整个序列 的。实践细究下去问题多得是,但那是我们的问题了。
“知识不全是线性的,大部分是网状的,知识点之间不一定有绝对的先后关系;前面内容看不懂,跳过去,并不影响学后面的;后面的学会了,有时候更容易看懂前面的。”——雷军
【连续转换,扫描模式】
.png)
同样的,连续扫描模式,一旦开始,不会停止转换,全部通道扫描。
注: 再扫描模式中仍然可以暂停,即间断模式,暂时不用理会….
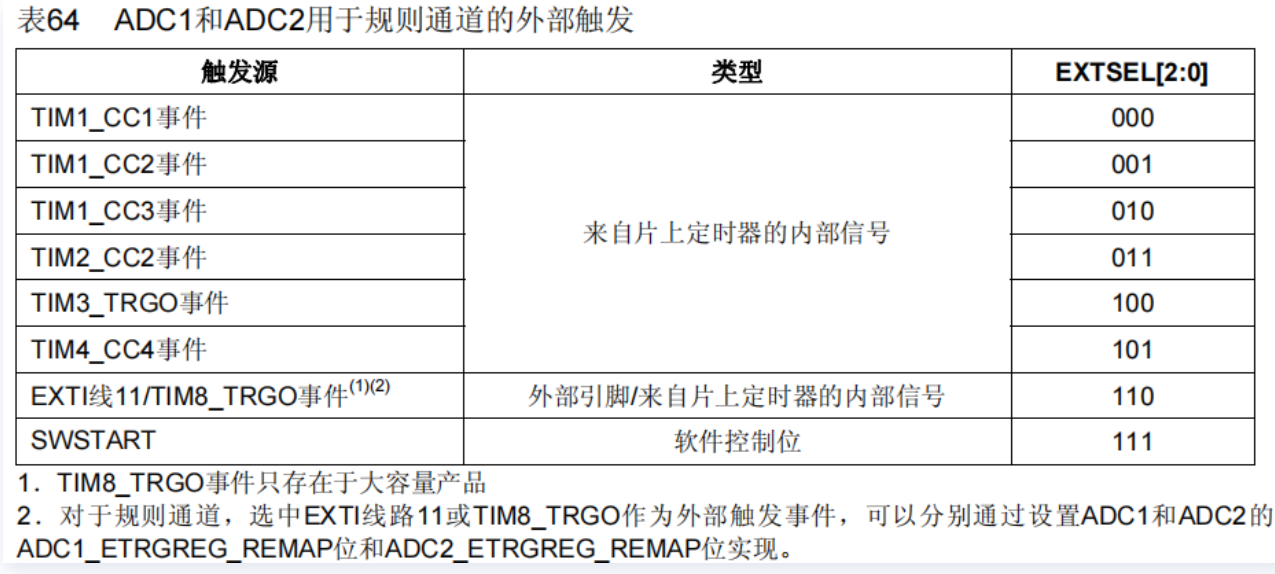
2.3 AD转换过程补充 2.3.1 触发控制 通过设置EXTSEL寄存器来选择控制源。
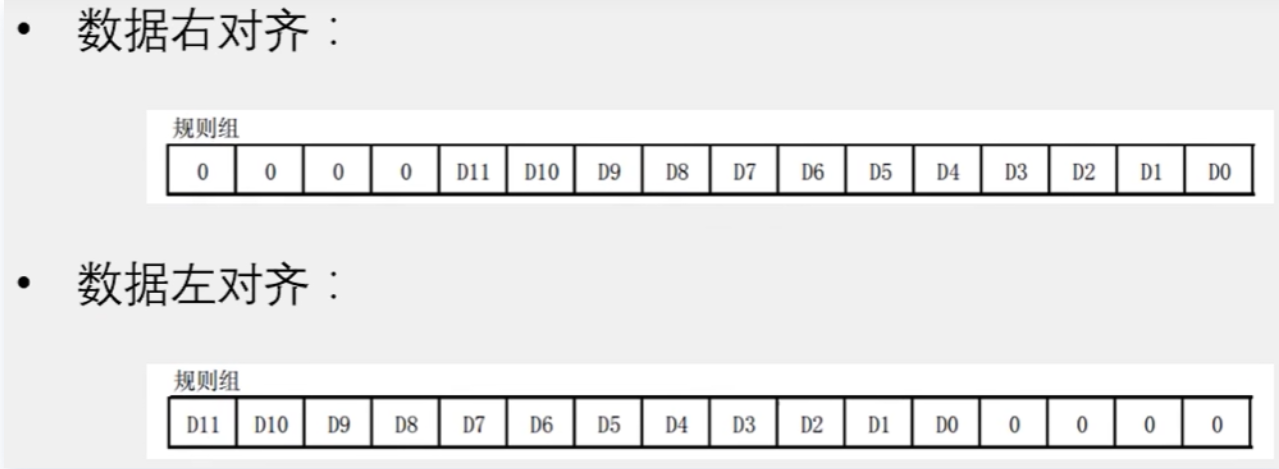
2.3.2 数据对齐 数据寄存器是16位的,ADC是12位的,因此存在一个数据对齐的问题,以便正确获取数据。一般使用右对齐,直接得到转换结果。
数据对齐常用于控制精度,如果后面的四位不要了,可以左对齐后只取高八位。但感觉比较鸡肋。
2.3.3 转换时间 A****D转换的步骤: 采样,保持;量化,编码
STM32 ADC的总转换时间为: **T****CONV****=采样时间+ 12.5个ADC周期**
需要采样保持的原因是,电压是波动的,因此想要在转换过程中,保持稳定。就需要这个采样保持电路。整个过程耗费时间即为采样时间 (越大越能防止毛刺信号,不过转换时间也会延长)。
12位的ADC需要12个转换周期,另外0.5个周期不知道干嘛。
例如: 当ADCCLK= 14MHz,采样时间为1.5个ADC周期TCONV= 1.5 + 12.5 = 14个ADC周期= 1μs
这就是最快时间了,再快需要ADCCLK超频,稳定性堪忧。
2.3.4 校准
ADC有一个内置自校准模式 。校准可大幅减小因内部电容器组的变化而造成的准精度误差。校准期间,在每个电容器上都会计算出一个误差修正码(数字值),这个码用于消除在随后的转换中每个电容器上产生的误差
建议在每次上电后执行一次校准
启动校准前,ADC必须处于关电状态超过至少两个ADC时钟周期
校准过程是固定的,只需要注意调用即可。
2.3.5 硬件电路 ADC外围电路设计:方便信号接入。
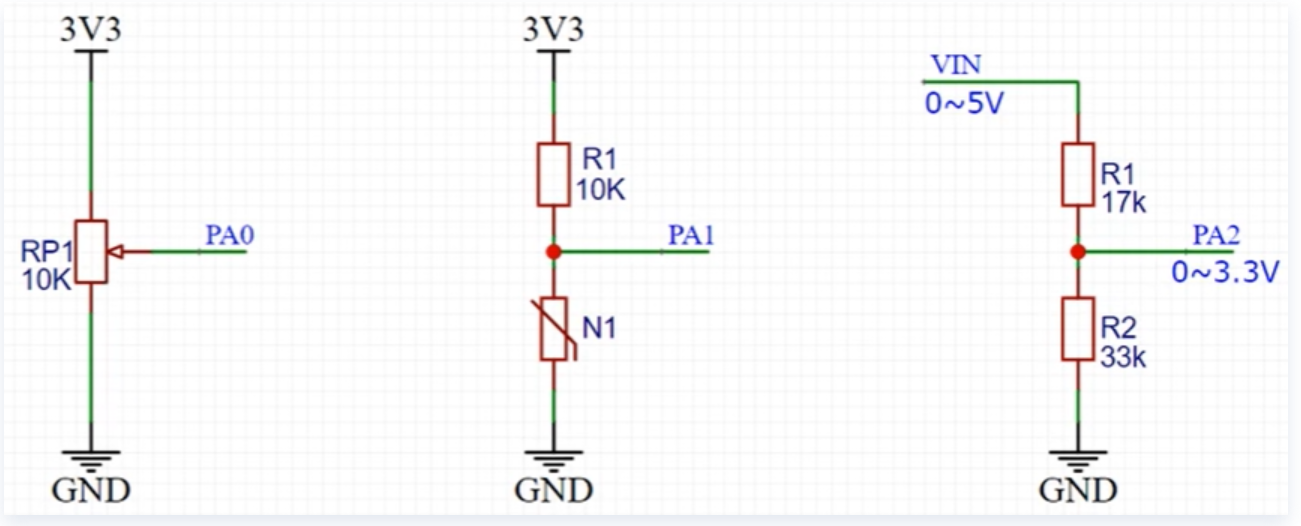
①电位器产生可调电压(滑动变阻器),注意阻值不要太小 。
②传感器产生输出电压电路,其光敏电阻、热敏电阻、红外接收管、麦克风等都可以等效为一个可变电阻 。因为电阻阻值没法直接测量,就需要串联一个电阻分压(阻值近似传感器阻值 ),来得到一个反应电阻值电压的电路。
③电压转换电路,同样的需要电阻进行分压。根据分压公式计算PA2电压范围。PA2=VIN/50K*33K。如果电压高于5V不建议使用该电路,比较危险。高电压采集最好需要一些专用的采集芯片,比如隔离放大器。
【案例】ADC单通道采集 ① 使能 ADC 和 GPIO 时钟 :ADC 属于 APB2 总线外设,需开启对应 ADC 时钟和采样引脚的 GPIO 时钟。以 ADC1 的通道 1(PA1)为例:
1 RCC_APB2PeriphClockCmd(RCC_APB2Periph_ADC1 | RCC_APB2Periph_GPIOA, ENABLE);
② 配置 GPIO 为模拟输入模式 :ADC 采样引脚需设置为模拟输入(无上下拉,不接外部电路时为高阻态),PA1 配置如下:
1 2 3 4 GPIO_InitTypeDef GPIO_InitStructure;
③ 配置 ADC 时钟分频 :ADC 时钟由 APB2 时钟(72MHz)分频得到,最大不超过 14MHz,通常分频为 6(72MHz/6=12MHz):
1 RCC_ADCCLKConfig(RCC_PCLK2_Div6);
④ 初始化 ADC 基本参数 :设置工作模式(独立模式)、扫描模式(单通道关闭扫描)、数据对齐(右对齐)、通道数(1 个):
1 2 3 4 5 6 7 8 ADC_InitTypeDef ADC_InitStructure;1 ;
⑤ 配置 ADC 通道采样顺序和时间 :单通道需设置采样顺序为 1,采样时间根据信号特性选择(如 55.5 周期,精度更高):
1 2 1 , ADC_SampleTime_55Cycles5);
⑥ 使能 ADC 并校准 :ADC 上电后需进行校准(提高精度),包括复位校准和正式校准:
1 2 3 4 5 6 7 8 9 ADC_Cmd(ADC1, ENABLE); while (ADC_GetResetCalibrationStatus(ADC1)); while (ADC_GetCalibrationStatus(ADC1));
⑦ 编写 ADC 读取函数 :通过软件触发转换,等待转换完成后读取数据(12 位 ADC,范围 0~4095):
1 2 3 4 5 uint16_t ADC_Read (void ) {while (!ADC_GetFlagStatus(ADC1, ADC_FLAG_EOC)); return ADC_GetConversionValue(ADC1);
⑧ 电压换算(可选) :若需将 ADC 值转换为实际电压(假设参考电压为 3.3V):
1 2 3 4 float ADC_GetVoltage (void ) {uint16_t adc_val = ADC_Read();return (float )adc_val * 3.3f / 4095.0f ;
⑨ 在 main 函数中使用 :初始化后调用读取函数获取 ADC 值或电压:
1 2 3 4 5 6 7 8 9 10 11 int main (void ) {while (1 ) {uint16_t adc_data = ADC_Read(); float voltage = ADC_GetVoltage(); 100 );
【案例】ADC多通道采集 ① 使能 ADC 和 GPIO 时钟 :开启 ADC 及多个采样引脚的 GPIO 时钟。以 ADC1 为例,采集 PA0(CH0)、PA1(CH1)、PA2(CH2)三个通道:
1 RCC_APB2PeriphClockCmd(RCC_APB2Periph_ADC1 | RCC_APB2Periph_GPIOA, ENABLE);
② 配置多个 GPIO 为模拟输入 :将所有采样引脚设为模拟输入模式:
1 2 3 4 GPIO_InitTypeDef GPIO_InitStructure;
③ 配置 ADC 时钟分频 :ADC 时钟不超过 14MHz,仍采用 72MHz/6=12MHz:
1 RCC_ADCCLKConfig(RCC_PCLK2_Div6);
④ 初始化 ADC 参数(开启扫描模式) :多通道需开启扫描模式,设置连续 / 单次转换,此处以单次扫描为例:
1 2 3 4 5 6 7 8 ADC_InitTypeDef ADC_InitStructure;3 ;
⑤ 配置多通道采样顺序和时间 :按顺序设置每个通道的采样顺序(1~3)和采样时间,顺序决定扫描先后:
1 2 3 4 5 6 1 , ADC_SampleTime_55Cycles5);2 , ADC_SampleTime_55Cycles5);3 , ADC_SampleTime_55Cycles5);
⑥ 使能 ADC 并校准 :同单通道,需执行复位校准和正式校准:
1 2 3 4 5 6 7 8 9 ADC_Cmd(ADC1, ENABLE); while (ADC_GetResetCalibrationStatus(ADC1));while (ADC_GetCalibrationStatus(ADC1));
⑦ 编写多通道读取函数 :触发一次扫描后,按顺序读取所有通道的转换结果(扫描完成后 EOC 标志置位):
1 2 3 4 5 6 7 8 9 10 11 12 uint16_t adc_val[3 ];void ADC_MultiRead (void ) {while (!ADC_GetFlagStatus(ADC1, ADC_FLAG_EOC));0 ] = ADC_GetConversionValue(ADC1); 1 ] = ADC_GetConversionValue(ADC1); 2 ] = ADC_GetConversionValue(ADC1);
⑧ 电压换算(可选) :将每个通道的 ADC 值转换为实际电压:
1 2 3 4 5 6 float adc_voltage[3 ];void ADC_ConvertVoltage (void ) {for (uint8_t i = 0 ; i < 3 ; i++) {float )adc_val[i] * 3.3f / 4095.0f ;
⑨ 在 main 函数中使用 :初始化后定时读取多通道数据:
1 2 3 4 5 6 7 8 9 10 11 int main (void ) {while (1 ) {100 );
三、DMA 3.1 简介
DMA (Direct Memory Access)直 接存储器存取
DMA可以提供外设和存储器 或者存储器和存储器之间 的高速数据传输,无须CPU干预,节省了CPU的资源
12个独立可配置的通道: DMA1 (7个通道),DMA2 (5个通道),每个通道都支持软件触发( 存储器间的) 和特定的硬件触发( 外设到存储器间)。
STM32F103C8T6 DMA资源:DMA1 (7个通道)
存储器映像
计算机组成部分: 运算器,控制器,存储器,输入输出设备CPU:运算器,控制器
存储器:主要是存储器的内容和地址
ROM:只读存储器,掉电不丢失数据
RAM:随机存储器,掉电丢失数据
其中系统存储器数据为厂家固定的启动加载程序,不修改。选项字节,在下载的时候可以不刷新其内容,保持不变,主要存的是flash读写保护、看门狗等配置。
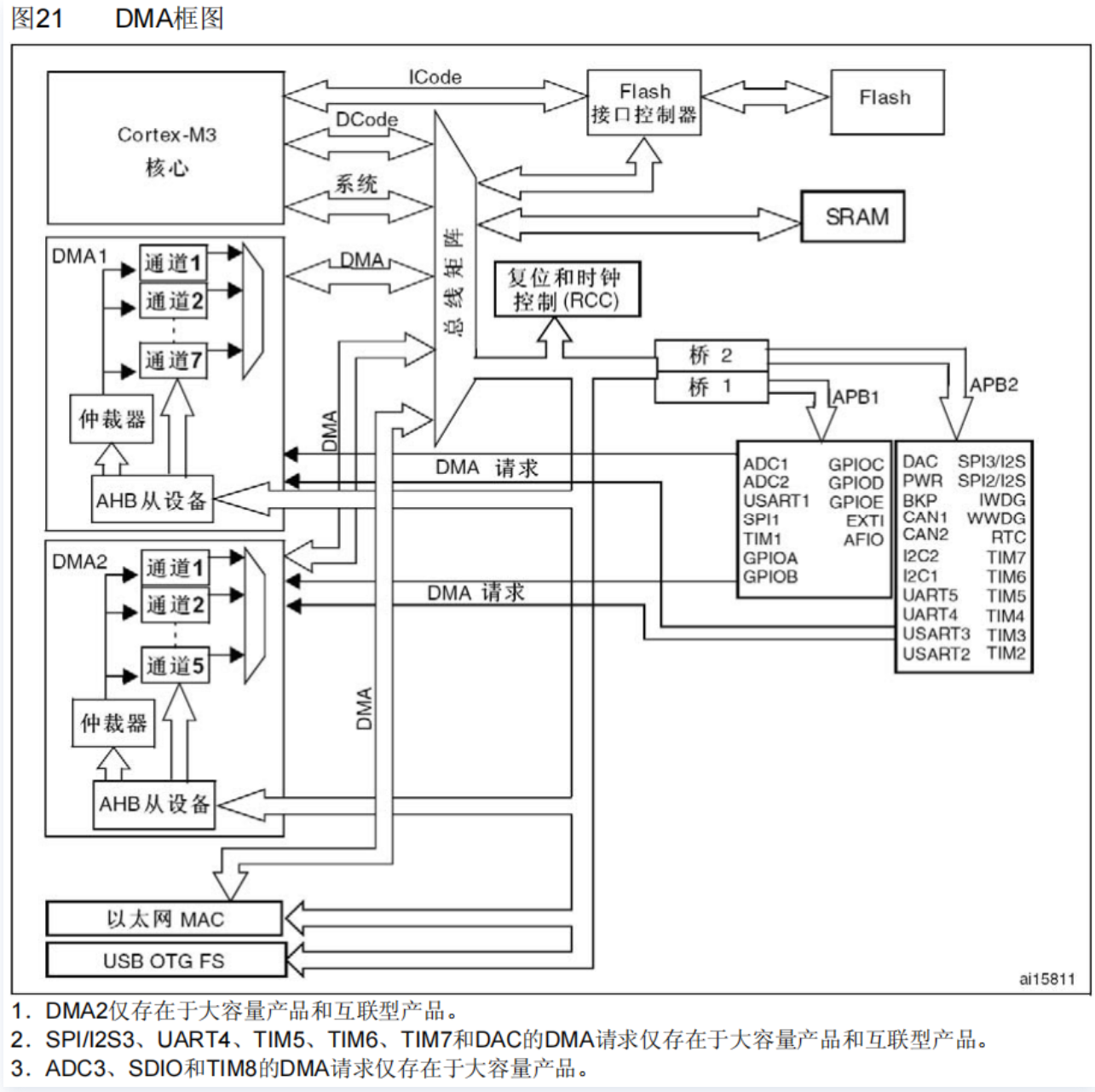
3.2 原理 3.2.1 DMA框图 看成CPU+存储器两大部分
寄存器: 是一种特殊存储器,一方面可以和存储器一样读写内容,另一方面,寄存器每一位背后都连接了一根导线,可以用于控制外设的状态。因此寄存器是连接软件和硬件的桥梁 。软件读写寄存器从而控制硬件执行。即外设是寄存器,寄存器就是存储器 。
如上图可看到DMA有三个,以太网DMA是自带的不用理会,剩下的DMA1和DMA2只要配置转移数据的源地址和目标地址就可以各自独立的工作了。其中有个仲裁器 ,这是因为虽然多个通道可以独立转运数据,但是DMA总线只有一条,因此只能分时复用这一条DMA总线,如果产生了冲突会使用仲裁器。另外再总线矩阵里也有一个仲裁器,如果DMA和CPU同时访问目标,那么DMA就会暂停CPU的访问, 防止冲突,此时仲裁器执行循环调度,以保证CPU至少可以得到一般的系统总线(存储器或外设)带宽 。
AHB从设备: DMA作为外设的寄存器,其连接在AHB总线上。所以DMA即是总线矩阵的主动单元,可以读写各种存储器,也是AHB总线上的被动单元,CPU通过这一条路线,就可以对DMA进行参数配置 了。
DMA请求: 由触发源(外设)发起,即DMA的硬件触发源 。收到请求后之后DMA就可以进行数据转运了。
其中Flash是ROM,只读存储器的一种,如果通过CPU或者DMA都是只能读取,不能写入 ,因此不能用作DMA目的地址。想要写入需要配置这个Flash接口控制器,对Flash进行写入,流程比较麻烦。SRAM可以随意读写,外设寄存器需要参考手册描述,一般数据寄存器可以正常读写。
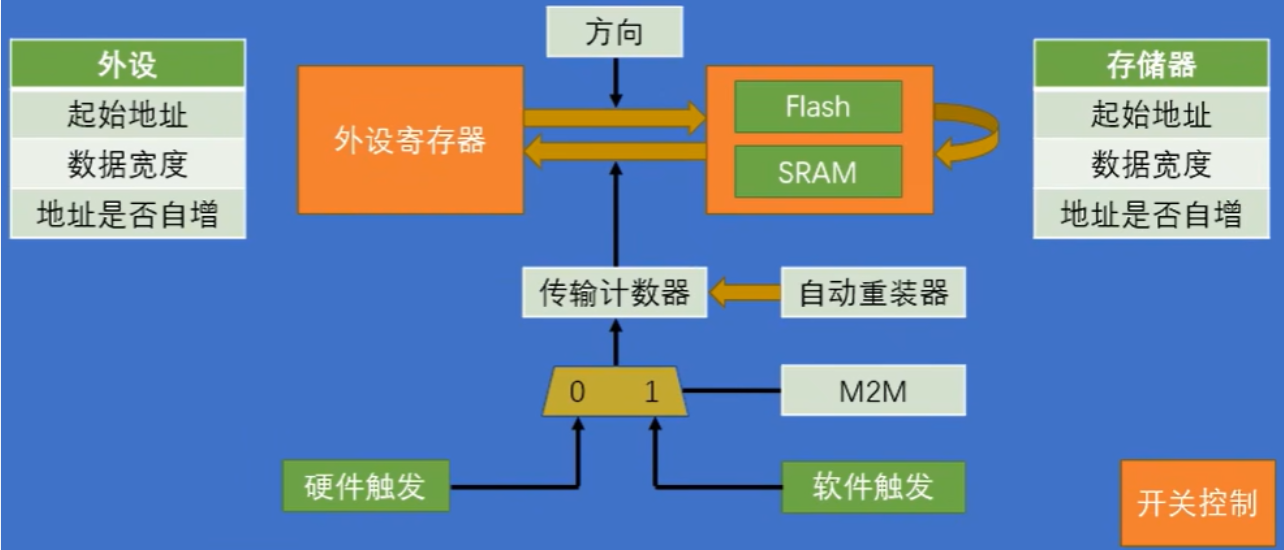
3.2.2 DMA基本结构 .png)
外设存储器地址可以是别的,也可以是自身相对的地址。
当传输计数器等于0时,且没有启动重装时,无论是否触发,DMA是不会运转的。此时只能先关闭DMA(必须 ),再对传输计数器写入一个大于0的值。
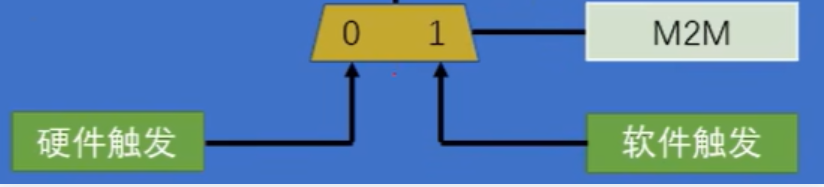
3.2.3 DMA请求 即DMA出发部分
图中EN位表示通道是否工作;M2M位=1时候选择软件触发。
软件触发是任意的,而每个通道的硬件触发源不同 ,需要注意。
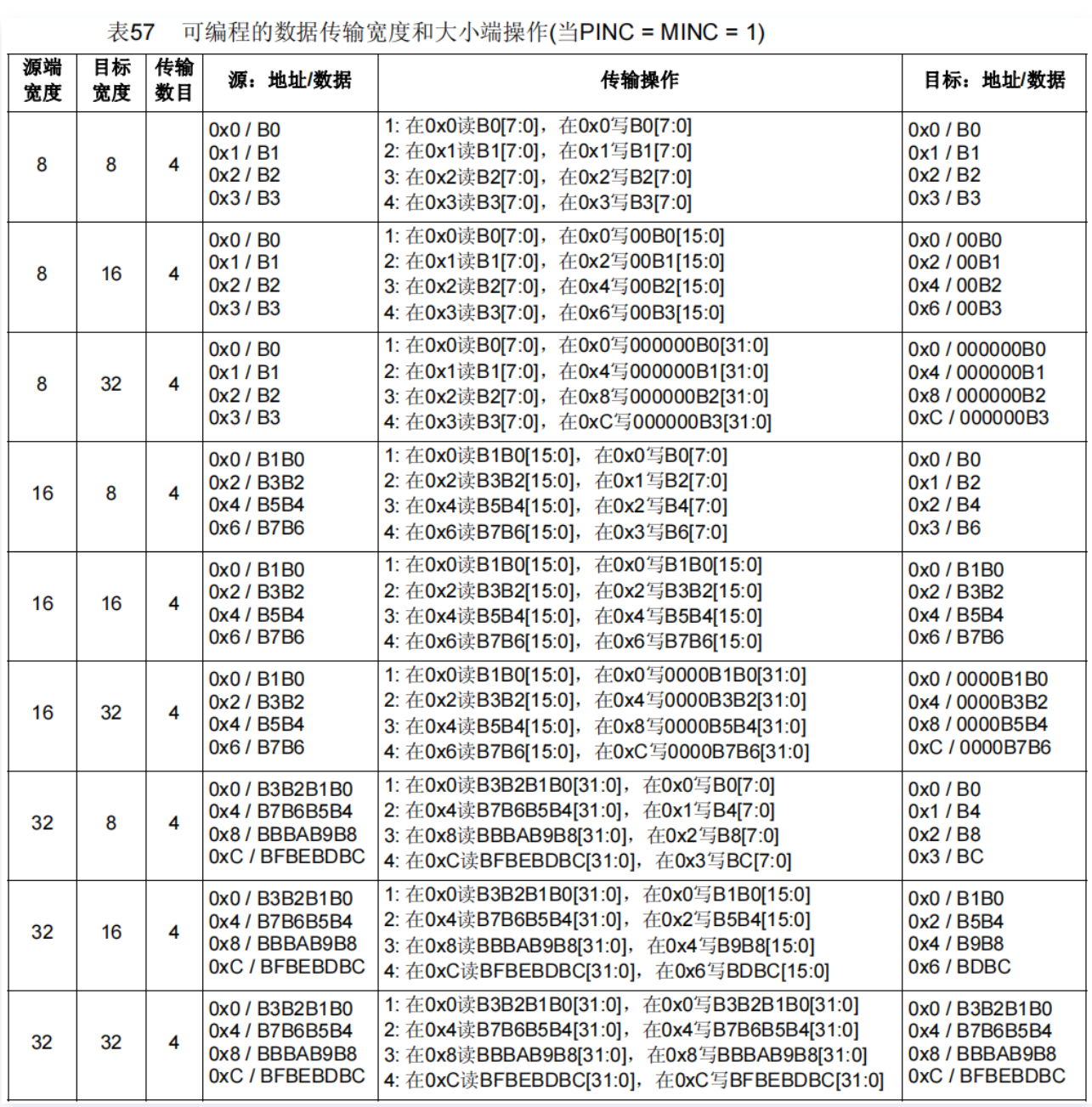
3.2.4 数据宽度与对齐 作用: 每个数据转运的站点都有数据宽度的参数描述,如果宽度一样,就正常处理,如果不一样就会使用到如下表格。
即,当数据宽度不统一时候,(小转大)可以在高位补0/(大转小)把多出来的高位舍弃掉不写入。传输数目是搬了4个数据,B1、B2等是数据,其/前面的是地址。
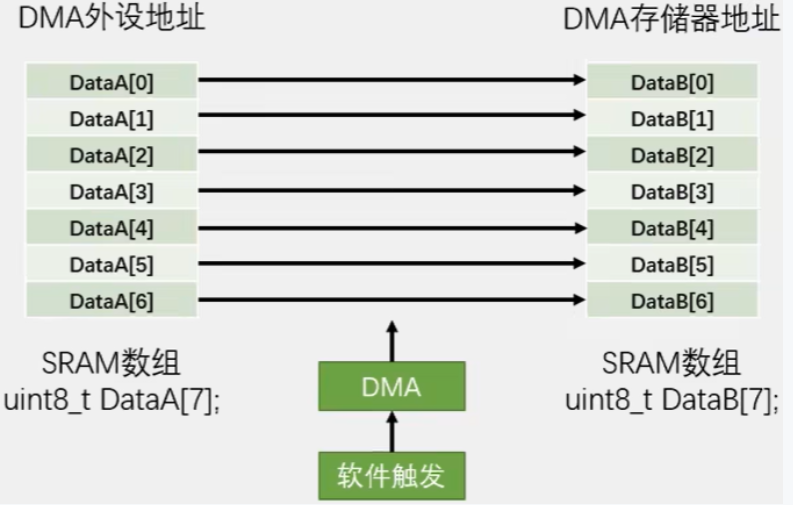
3.2.5 数据转运操作描述 传输方向: 存储器——存储器
转运规定的次数7后,传输计数器自减到0,DMA停止,转运完成。转运是复制转运 ,DataA[x]的数据并不会消失,会一直有数据。
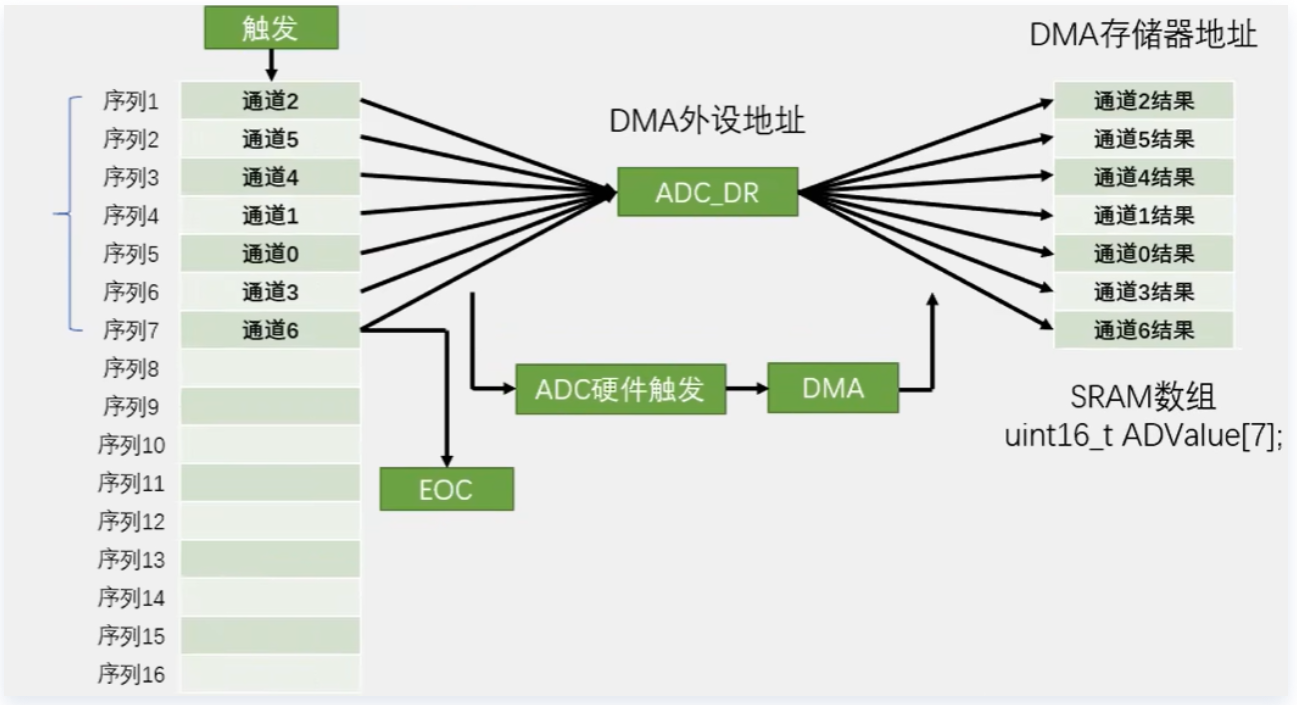
传输方向: 外设——存储器
触发一次AD,7个通道依次进行转换,再每个通道转换完成后,进行一次DMA数据转运,并且目的地址自行自增,这样就不会覆盖了。
即DMA配置: 外设地址写ADC_DR寄存器地址,不自增;存储器地址可以自行创建数组来使用(注意数据寄存器的宽度 ,设置为一致),并且设置自增 。转运计数器为7,代表转运次数 。
计数器是否重装,可以看ADC配置,如果是单次扫描,DMA的传输计数器可以不自动重装;如果是连续扫描,那DMA就可以使用自动重装, 在ADC启动下一轮转换的时候,DMA也启动下一轮转运。
ADC_DR的值是在ADC单个通道转换完成后才会有效,因此DMA转运时机,需要和ADC单个通道转换完成同步。所以DMA的触发选择要选ADC的硬件触发 。
因为ADC转换完成后没有任何标志位,也不会触发中断,所以不好判断某个通道转换完成的时机。根据视频老师的实践,虽然单个ADC通道 转换完成后不产生标志位和中断,但是应该会产生DMA请求去触发DMA搬运 。ADC+DMA弥补了ADC数据覆盖的缺陷,天作之合。
3.3使用 【案例】DMA转运ADC ① DMA 简介 :DMA(直接存储器访问)可在不占用 CPU 的情况下,实现存储器与外设、存储器与存储器之间的数据直接传输,常用于 ADC、SPI、UART 等外设的数据批量转运。以下以 “ADC 多通道采集 + DMA 转运” 为例,说明标准库配置步骤。
② 使能相关时钟 :开启 ADC、GPIO、DMA 时钟(DMA1 属于 AHB 总线)。以 ADC1+DMA1_Channel1 为例:
1 2 RCC_APB2PeriphClockCmd(RCC_APB2Periph_ADC1 | RCC_APB2Periph_GPIOA, ENABLE);
③ 配置 GPIO 为模拟输入 :同多通道 ADC,如 PA0(CH0)、PA1(CH1):
1 2 3 4 GPIO_InitTypeDef GPIO_InitStructure;
④ 配置 ADC 时钟和基本参数 :开启扫描 + 连续模式(配合 DMA 自动转运):
1 2 3 4 5 6 7 8 9 10 11 2 ;
⑤ 配置 ADC 通道顺序 :设置两个通道的采样顺序和时间:
1 2 ADC_RegularChannelConfig(ADC1, ADC_Channel_0, 1 , ADC_SampleTime_55Cycles5); 2 , ADC_SampleTime_55Cycles5);
⑥ 配置 DMA 参数 :ADC1 对应 DMA1_Channel1,设置数据方向、缓冲区地址、转运次数等:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 DMA_InitTypeDef DMA_InitStructure;uint32_t )&ADC1->DR;uint32_t )adc_dma_buf;2 ;
⑦ 使能 DMA 和 ADC,启动转换 :关联 ADC 与 DMA,开启转运:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 uint16_t adc_dma_buf[2 ];while (ADC_GetResetCalibrationStatus(ADC1));while (ADC_GetCalibrationStatus(ADC1));
⑧ 数据使用 :DMA 会自动将 ADC 转换结果按顺序存入adc_dma_buf,CPU 可直接读取数组使用:
1 2 3 uint16_t ch0_val = adc_dma_buf[0 ];uint16_t ch1_val = adc_dma_buf[1 ];
【案例】DMA转运USART ① DMA 简介 :DMA(直接存储器访问)可实现外设与存储器之间存储器之间的无 CPU 干预数据传输,以下以 USART1(串口 1)为例,分别说明 “DMA 发送” 和 “DMA 接收” 的配置步骤(基于 STM32 标准库)。
② 使能相关时钟 :开启 USART1、GPIO(串口引脚)、DMA 时钟。USART1 属于 APB2 总线,GPIOA(TX=PA9,RX=PA10)属于 APB2 总线,DMA1 属于 AHB 总线:
1 2 RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1 | RCC_APB2Periph_GPIOA | RCC_APB2Periph_AFIO, ENABLE);
③ 配置串口 GPIO :PA9(TX)为复用推挽输出,PA10(RX)为浮空输入:
1 2 3 4 5 6 7 8 9 10 GPIO_InitTypeDef GPIO_InitStructure;
④ 初始化 USART1 基本参数 :设置波特率、数据位、停止位等(以 115200-8-N-1 为例):
1 2 3 4 5 6 7 8 9 USART_InitTypeDef USART_InitStructure;115200 ;
⑤ 配置 DMA 发送通道 :USART1 发送对应 DMA1_Channel4,设置数据从存储器到外设:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 DMA_InitTypeDef DMA_InitStructure;uint32_t )&USART1->DR;uint32_t )tx_buf;
⑥ 使能 USART1 的 DMA 发送请求 :
1 USART_DMACmd(USART1, USART_DMAReq_Tx, ENABLE);
⑦ 编写 DMA 发送函数 :启动 DMA 传输,等待发送完成:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 uint8_t tx_buf[100 ]; uint16_t TX_LEN = 0 ; void USART1_DMA_Send (uint8_t *data, uint16_t len) {memcpy (tx_buf, data, len);while (DMA_GetFlagStatus(DMA1_FLAG_TC4) == RESET);
⑧ 配置 DMA 接收通道 :USART1 接收对应 DMA1_Channel5,设置数据从外设到存储器:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 uint32_t )&USART1->DR;uint32_t )rx_buf;
⑨ 使能 USART1 的 DMA 接收请求并启动接收 :
1 2 3 4 5 6 7 #define RX_BUF_SIZE 100 uint8_t rx_buf[RX_BUF_SIZE];
⑩ 读取接收数据 :通过 DMA 当前计数器计算已接收字节数:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 uint16_t USART1_DMA_GetRxLen (void ) {return RX_BUF_SIZE - DMA_GetCurrDataCounter(DMA1_Channel5);void USART1_ProcessRxData (void ) {uint16_t len = USART1_DMA_GetRxLen();if (len > 0 ) {
笔记部分引用菜工啊潜
STM32标准库系列文章
STM32标准库笔记(一)-准备、GPIO、中断 | 超小韓の个人博客
STM32标准库笔记(二)-PWM、ADC、DMA | 超小韓の个人博客
STM32标准库笔记(三)-USART、I2C、SPI | 超小韓の个人博客
STM32标准库笔记(四)-BKP、RTC、PWR、WDG、FLASH | 超小韓の个人博客

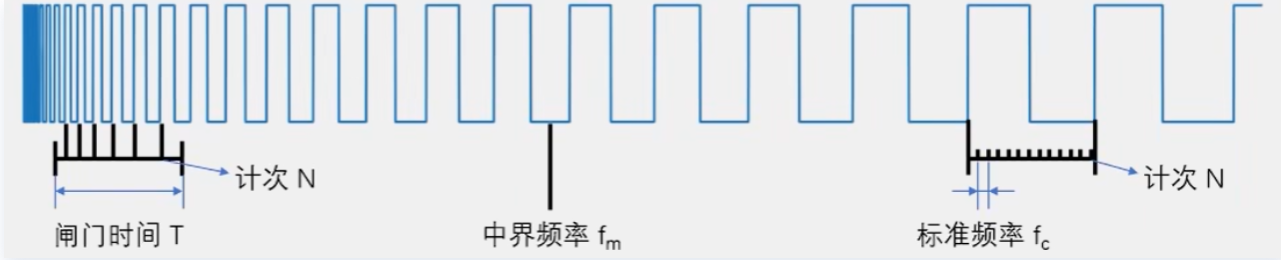 。闸门时间内,N越小误差越大,因此适合高频信号。
。闸门时间内,N越小误差越大,因此适合高频信号。 ,N计次多可以减小误差,因此适合低频信号。
,N计次多可以减小误差,因此适合低频信号。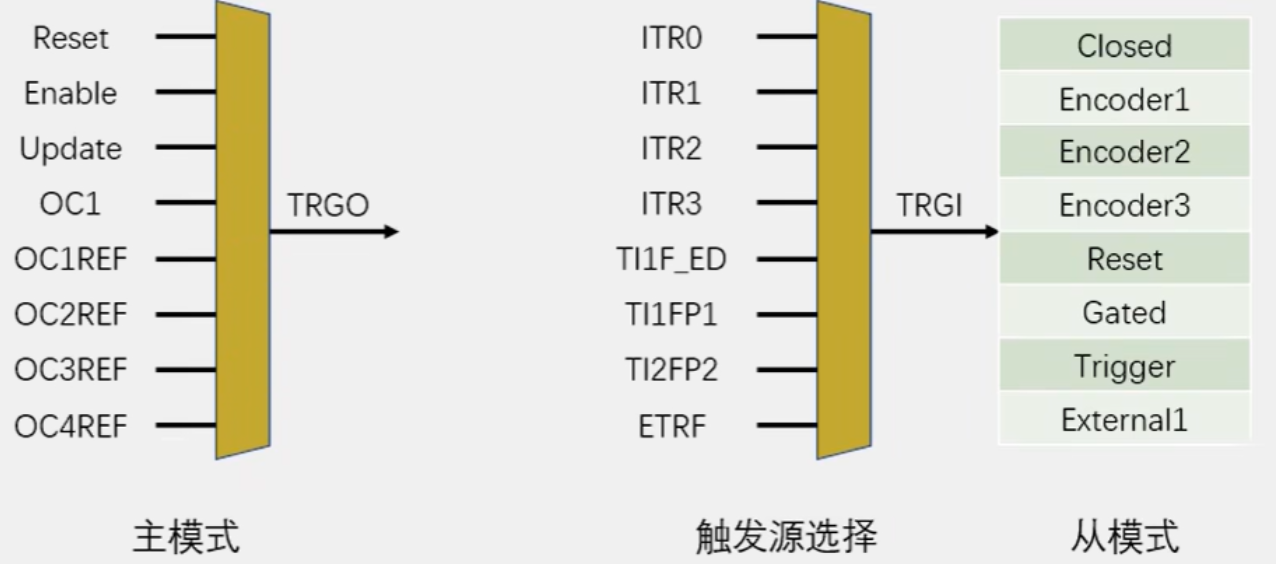 。待测信号频率<中界频率时,使用测周法;待测信号频率>中界频率时,选用测频法。
。待测信号频率<中界频率时,使用测周法;待测信号频率>中界频率时,选用测频法。